

Регулятор с опережением по фазе
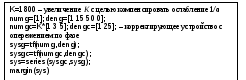
Рис. 8.6. Скрипт MatLab для построения диаграммы Боде
Скорректированной системы
На рис. 8.7 и 8.8 приведены переходная характеристика системы и программа, с помощью которой она построена.
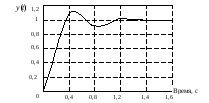 Рис.
8.7. Переходная характеристика регулятора
с опережением по фазе
Рис.
8.7. Переходная характеристика регулятора
с опережением по фазе
K=1800
%
numg=[1];
deng=[1 15 50 0]; sysg=tf(numg,deng);
numgc=K*[1
3 5]; dengc=[1 25]; sysgc=tf(numgc,dengc); % syso=series(sysgc,sysg); sys=feedback(syso,[1]);
%
t=[0:0.01:2];
step(sys,t)
ylable
(‘y(t)’)
Рис. 8.8. Скрипт MatLab для построения переходной характеристики
В окончательном виде передаточная функция корректирующего устройства выглядит как
![]()
где значение К = 1800 получено итеративным способом с помощью соответствующей программы.
С помощью синтезированного корректирующего устройства мы удовлетворили требования ко времени установления и перерегулированию, но Кv = 5, а это значит, что при линейном воздействии установившаяся ошибка будет равна 20% от скорости этого воздействия. Хотя, как и ожидалось, корректирующее устройство с опережением по фазе позволило увеличить запас по фазе и улучшить вид переходной характеристики, можно продолжить синтез и попытаться дополнить коррекцию устройством интегрирующего типа.
8.6. Отчет по лабораторной работе
Отчет оформляется в соответствии с требованиями, предъявляемыми к оформлению лабораторных работ в вузе, и должен содержать:
Титульный лист.
Название и цель работы.
Исходные данные варианта задачи и структурную схему САУ.
Временные характеристики, диаграмму Боде и скрипт MatLab для нескорректированной системы.
Уравнение передаточной функции, временные характеристики, диаграмму Боде и скрипт MatLab для скорректированной системы.
Уравнение передаточной функции корректирующего звена.
Анализ динамических характеристик исходной и скорректированной системы. Покажите, как изменилось поведение скорректированной системы в переходном режиме.
Выводы.
Ответы на контрольные вопросы
8.7. Задачи для самостоятельной работы
Задача 1
НАСА предполагает создать робота, который будет заниматься строительством постоянно действующей лунной станции. Система управления положением захватывающего устройства робота имеет структуру, изображенную на рис. 8.9, где
![]() и
и
![]()
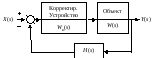
Рис. 8.9. Схема управления захватывающим устройством
Синтезируйте корректирующее устройство с отставанием по фазе, которое будет обеспечивать запас по фазе 45о. Проанализируйте временные характеристики САУ в переходном режиме до и после коррекции.
Задача 2
На рис. 8.10 приведена структурная схема системы управления положением лунного исследовательского аппарата. Затухание в динамике аппарата является пренебрежимо малым, а управление положением осуществляется с помощью реактивных двигателей. Создаваемый ими момент в первом приближении можно считать пропорциональным сигналу V(s), так что T(s) = K2V(s). Коэффициент затухания в контуре проектировщик может выбрать так, чтобы обеспечить необходимое затухание. Требуется, чтобы коэффициент затухания ξ был равен 0,6, а время установления (по критерию 2%) не превышало 2,5 с. Подберите передаточную функцию WK(s) корректирующего устройства с опережением по фазе, пользуясь частотными характеристиками. Для расчета примите J = 90. . Проанализируйте временные характеристики САУ в переходном режиме до и после коррекции.
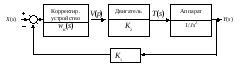
Рис. 8.10. Система управления положением модуля
Задача 3
На рис. 8.11 изображена упрощенная модель системы управления скоростью самолета типа F-94 или X-15.
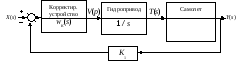
Рис. 8.11. Система управления положением самолета
При скорости полета, в 4 раза превышающей скорость звука, на высоте 10 000 м передаточная функция самолета имеет следующие параметры: 1 / τα = 1,0, K1 = 1,0, ξωα = 1,0, ωα = 4. Синтезируйте корректирующее устройство WK(p) так, чтобы реакция системы на ступенчатый сигнал имела перерегулирование менее 5% и время установления (по критерию 2%) менее 5 с. . Проанализируйте временные характеристики САУ в переходном режиме до и после коррекции.
Задача 4
Электромагнитные муфты сцепления широко используются в качестве исполнительных устройств благодаря тому, что они могут развивать на выходе высокую механическую мощность (до 200 Вт). Они обладают высоким отношением развиваемого момента к моменту инерции и малой постоянной времени.
На рис. 8.12 изображена система управления положением стержня ядерного ректора, в которой используется муфта. Двигатель вращает в противоположных направлениях две части сцепления, которые через параллельные редукторные передачи связаны с выходным валом. Направление вращения выходного вала зависит от того, какая муфта в данный момент активизирована.
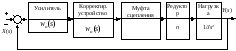
Рис. 8.12. Система управления положением стержня ядерного реактора
Постоянная времени 200-ваттной муфты равна 1/40 с. Остальные параметры таковы, что КТn/J = 1. Требуется, чтобы при ступенчатом входном сигнале максимальное перерегулирование находилось в пределах от 10 до 20%, а время установления (по критерию 2%) не превышало 2 с. Синтезируйте корректирующее устройство, удовлетворяющее этим требованиям. . Проанализируйте временные характеристики САУ в переходном режиме до и после коррекции.
Задача 5
Производительность химического реактора непосредственно зависит от добавления катализатора, как показано на структурной схеме (рис. 8.13). Время запаздывания Т = 50 с, а постоянная времени τ = 40 с.

Рис. 8.13. Система управления химическим реактором
Коэффициент усиления объекта К = 1. Требуется, чтобы при ступенчатом входном сигнале Х(s) = А/р установившаяся ошибка была меньше чем 0,1 А. С помощью диаграммы Боде синтезируйте корректирующее устройство, обеспечивающее приемлемый вид реакции системы. Для скорректированной системы оцените время установления. . Проанализируйте временные характеристики САУ в переходном режиме до и после коррекции.
Задача 6
В системе с единичной обратной связью, изображенной на рис. 8.9, объект управления представлен передаточной функцией
![]()
Подберите корректирующее устройство с опережением и отставанием по фазе так, чтобы при ступенчатом входном сигнале перерегулирование было не более 5%, а время установления (по критерию 2%) – не более 1 с. Также требуется, чтобы коэффициент ошибки по ускорению Кα был более 7 500 (см. табл. 5.5. в [1]). . Проанализируйте временные характеристики САУ в переходном режиме до и после коррекции.
Задача 7
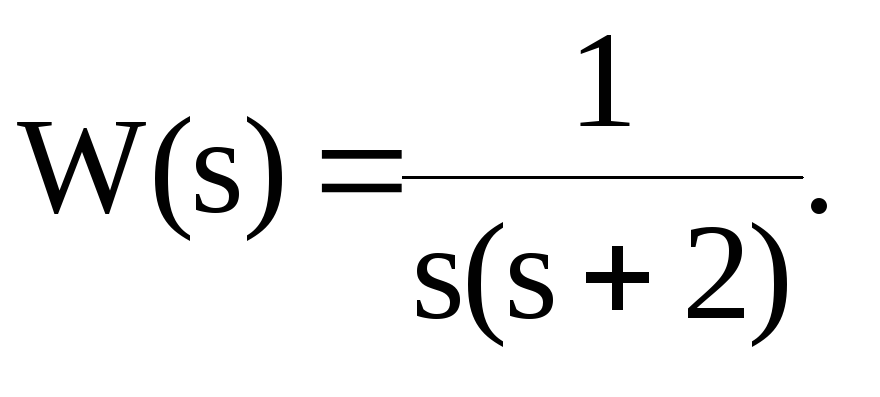
Объект управления в системе с единичной обратной связью имеет передаточную функцию
![]()
Синтезируйте корректирующее устройство так, чтобы запас по фазе составлял по крайней мере 75о. Для решения задачи воспользуйтесь двухзвенным устройством с опережением по фазе:
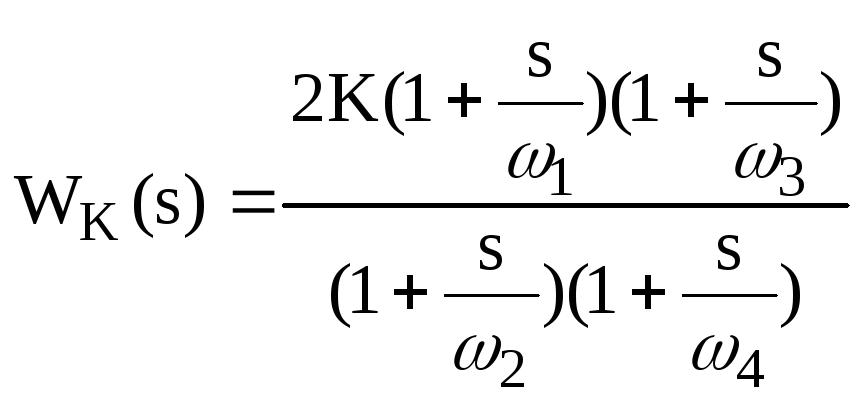
Кроме того, требуется, чтобы при линейном входном сигнале установившаяся ошибка составляла 0,5% от скорости этого сигнала (Кv = 200). . Проанализируйте временные характеристики САУ в переходном режиме до и после коррекции.
Задача 8
На рис. 8.14 изображена система с отрицательной обратной связью.
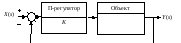
Рис. 8.14. Одноконтурная система с пропорциональным регулятором
Подберите П-регулятор, WK(s) = К, так, чтобы запас по фазе был равен 45о. С помощью MatLab постройте диаграмму Боде и убедитесь, что выдвинутое требование удовлетворяется. . Проанализируйте временные характеристики САУ в переходном режиме до и после коррекции.
Задача 9
Рассмотрите систему, изображенную на рис. 8.15, где
Синтезируйте регулятор WK(s) так, чтобы при линейном входном сигнале установившаяся ошибка равнялась нулю, а время установления (по критерию 2%) было менее 5 с. Получите реакцию системы на линейный сигнал, Х(s) = 1/s, и убедитесь, что выдвинутые требования удовлетворяются.
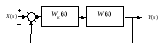
Рис. 8.15. Замкнутая система управления
Проанализируйте временные характеристики САУ в переходном режиме до и после коррекции.
Задача 10
Передаточная функция истребителя имеет вид:
![]()
![]()
где – угловая скорость самолета относительно поперечной оси, рад/с;
δ – отклонение руля высоты, рад.
Структурная схема системы управления переменной изображена на рис. 8.16.

Рис. 8.16. Система управления самолетом
Пусть Wk(s) соответствует регулятору с опережением по фазе, т.е.
![]()
![]()
где
![]() .
.
С помощью диаграммы Боде выполните синтез регулятора на основании следующих требований к качеству системы: при единичном ступенчатом входном сигнале время установления (по критерию 2%) должно быть менее 2 с, а относительное перерегулирование – меньше 10%. Промоделируйте систему, считая, что входная ступенька имеет амплитуду 10о/с, и получите график изменения переменной . Проанализируйте временные характеристики САУ в переходном режиме до и после коррекции.
Задача 11
Изменение положения жесткого спутника описывается уравнением
J = u,
где J – момент инерции;
u – приложенный к спутнику вращающий момент.
В системе управления угловым положением использован ПД-регулятор:
![]()
а) Изобразите структурную схему системы управления. Выполните синтез системы в соответствии со следующими требованиями: полоса пропускания замкнутой системы должна приблизительно равняться 10 рад/с, а при ступенчатом входном сигнале с амплитудой 10о перерегулирование не должно превышать 20%. Синтез выполните в интерактивном режиме с помощью предварительно подготовленной программы в среде MatLab.
б) Проверьте результат синтеза, получив путем моделирования реакцию системы на ступенчатый сигнал указанной величины.
в) Постройте диаграмму Боде для замкнутой системы и проверьте, выполнено ли требование к полосе пропускания.
Задача 12
Рассмотрите систему управления, изображенную на рис. 8.17. Вам предлагается с помощью частотных характеристик синтезировать регулятор с отставанием по фазе исходя из следующих требований: при ступенчатом входном сигнале установившаяся ошибка системы не должна превышать 10%, запас по фазе должен быть более 45о, а время установления (по критерию 2%) – менее 5 с.
а) Выполните поставленную задачу, используя диаграмму Боде.
б) Проверьте результат синтеза, получив с помощью моделирования переходную характеристику замкнутой системы до и после коррекции;
в) Применив функцию margin, вычислите действительное значение запаса по фазе.
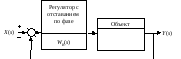
Рис. 8.17. Система управления с единичной обратной связью
Задача 13
На рис. 8.18 изображен внутренний контур системы обеспечения горизонтального положения самолета в воздухе. Динамика самолета представлена передаточной функцией.
а) Синтезируйте регулятор так, чтобы система удовлетворяла следующим требованиям: при ступенчатом входном сигнале время установления (по критерию 2%) должно быть менее 1 с, а при линейном сигнале, изменяющемся с единичной скоростью, установившаяся ошибка не должна превышать 0,1.
б) Путем моделирования получите переходную характеристику процесса до и после коррекции и проверьте результат синтеза.

Рис. 8.18. Внутренний контур радиолокационной системы