

7.10. Контрольные вопросы
Дать определение передаточной функции, полюсов, нулей, корневого годографа. Назвать типовые звенья САУ. Что такое отрицательная обратная связь?
Показать влияние расположения нуля на поведение ветвей КГ (для примера, указанного преподавателем).
Показать на конкретном примере, что по мере удаления ветви КГ от начала координат движение ветви в зависимости от K замедляется.
Провести анализ влияния изменения расположения полюса или нуля (по указанию преподавателя) на величины Kкр и ωкр.
Показать, как связаны между собой логарифмические частотные характеристики, расположение корней на комплексной плоскости и переходные характеристики?
7.11. Литература
Ануфриев, И. Е. Самоучитель Matlab 5.3/6.x / И. Е. Ануфриев. – СПб. : БХВ-Петербург, 2002.
Мартынов, Н. Н. Введение в Matlab 6 / Н. Н. Мартынов. – М. : КУДИЦ, 2002.
Using the Control System Toolbox with Matlab 6: Computation. Visualization. Programming. - The MathWorks, Inc., 2001.
Методы классической и современной теории автоматического управления : учебник : в 3 т. / под общ. ред. Н. Д. Егупова. – М. : Изд-во МГТУ им. Н. Э. Баумана, 2000.
Лабораторная работа № 8
Синтез и оптимизация линейных систем
автоматического управления
Содержание
8.1. Общие указания к выполнению лабораторной работы.
8.2. Цель работы.
8.3. Краткие сведения из теории.
8.4. Постановка задачи.
8.5. Методика выполнения работы.
8.6. Отчет по лабораторной работе.
8.7. Задачи для самостоятельной работы.
8.8. Контрольные вопросы.
8.9. Литература.
8.1. Общие указания к выполнению лабораторной работы
Лабораторная работа выполняется на персональном компьютере в операционной среде Windows с установленной системой MatLab 6.x и пакетом прикладных программ Control System Toolbox 5.1.
8.2. Цель работы
Синтез и оптимизация линейных систем автоматического управления при помощи введения корректирующего устройства с отставание по фазе.
8.3. Краткие сведения из теории
Иногда желаемое качество системы можно обеспечить просто путем настройки параметров системы. Если этого оказывается недостаточно, то для достижения желаемого результата должна быть изменена структура системы.
Коррекция динамических свойств осуществляется с целью выполнения требований по устойчивости и качеству переходного процесса.
Осуществляется коррекция с помощью введения в САУ специальных корректирующих звеньев. Корректирующее устройство – это элемент или схема, дополнительно вводимые в систему управления с целью исправления ее динамических характеристик. Эти звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им. Соответственно, они и называются последовательными либо параллельными корректирующими звеньями. Несколько вариантов коррекции показано на рис. 8.1.
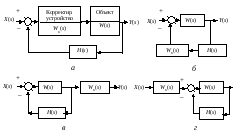
Рис. 8.1. Варианты коррекции
а – последовательная коррекция;
б – корректирующее устройство в цепи обратной связи;
в – коррекция по выходу или по нагрузке; г – коррекция по входу схемы
Качество системы управления может быть описано с помощью как ее временных, так и частотных характеристик. Требования к качеству могут быть заданы, например, в виде величины максимального перерегулирования, времени максимума переходной характеристики и времени ее установления. Кроме того, обычно необходимо знать максимально допустимую установившуюся ошибку при различных тестовых входных сигналах и внешних возмущениях.
Все эти требования к качеству можно связать с желаемым расположением полюсов и нулей передаточной функции замкнутой системы WЗ(s).
Достаточно просто построить корневой годограф замкнутой системы при изменении какого-либо ее параметра. Однако если корневой годограф не позволяет найти желаемое расположение корней, то в систему необходимо ввести корректирующее устройство, которое повлияет на вид корневого годографа и даст возможность, варьируя параметр системы, разместить корни в соответствии с требованиями к качеству.
Качество замкнутой системы можно оценить и по частотным характеристикам, главным образом по максимальному значению амплитудной характеристики А(s), резонансной частоте ωr, полосе пропускания и запасу устойчивости по фазе.
Чтобы удовлетворить требования, предъявляемые к качеству системы, при необходимости в нее вводится корректирующее устройство. Синтез этого устройства можно произвести пользуясь любой формой представления частотных характеристик – в полярных координатах, в виде диаграммы Боде.
В случае последовательной коррекции предпочтительнее использовать диаграмму Боде, так как в этом случае частотные характеристики корректирующего устройства просто складываются с соответствующими характеристиками исходной системы.
Таким образом, синтез системы предполагает изменение вида ее частотных характеристик или корневого годографа так, чтобы удовлетворить требования, предъявляемые к качеству системы.
С практической точки зрения наилучшим и наиболее простым способом улучшения качества системы является, если это возможно, изменение самого объекта управления: если проектировщик способен в процессе синтеза изменить передаточную функцию объекта управления W(p), то тем самым можно улучшить и качество системы. Например, чтобы улучшить динамику сервопривода, часто бывает достаточно выбрать двигатель с наилучшими параметрами. При проектировании системы управления самолетом разумнее сначала изменить его аэродинамические свойства так, чтобы улучшить полезные характеристики. Поэтому проектировщик систем управления должен ясно понимать, что улучшение качества системы в первую очередь связано с изменением свойств объекта управления.
Однако часто либо объект вообще невозможно изменить, либо он уже был изменен настолько, насколько возможно, но качество системы еще неудовлетворительно. Тогда остается единственная возможность добиться желаемого качества системы – за счет введения корректирующего устройства.
Дальше мы будем предполагать, что передаточная функция объекта не может быть изменена.