

8.4. Постановка задачи
В качестве объекта исследования в лабораторной работе выступает система управления намоткой ротора, структурная схема которой изображена на рис. 8.2. Цель синтеза – обеспечить высокую точность при отработке системой линейного входного сигнала. Если этот сигнал имеет единичную скорость, то Х(s) = 1/s и установившаяся ошибка равна
![]()
где
![]()
Кроме этого, надо учитывать величину перерегулирования и время установления реакции системы на ступенчатый сигнал.

Рис. 8.2. Структурная схема управления намоткой ротора
Предположим, что регулятор представляет собой простой усилитель с передаточной функцией WK(s) = К. В этом случае установившаяся ошибка будет равна
![]()
Чем больше К, тем меньше будет установившаяся ошибка, но увеличение К будет негативно сказываться на переходной характеристике. В случае нелинейного входного сигнала при К = 500 установившаяся ошибка будет равна 10% от скорости входного сигнала, но при ступенчатом воздействии величина перерегулирования составит 70%, а время установления – 8 с. Такое качество неприемлемо. Поэтому требуется коррекция системы.
В данной лабораторной работе будет использовано корректирующее устройство с опережением по фазе, т.е.
![]()
где
![]() .
.
Для синтеза корректирующего устройства используем частотные характеристики. Требование, чтобы установившаяся ошибка не превышала 10% от скорости линейного входного сигнала, приводит к тому, что необходимо иметь Кv = 10. Время установления (по критерию 2%) должно быть ТS ≤ 3 с, и относительное перерегулирование ≤ 10%. Тогда имеем следующие соотношения:
Перерегулирование
=
![]() и
и![]() .
.
Из них находим, что ξ = 0,59 и ωn = 2,26. Следовательно, можно определить требования к запасу по фазе:
![]()
![]()
8.5. Методика выполнения работы
Процедура синтеза включает следующие этапы:
1. Построить диаграмму Боде для нескорректированной системы при К = 500 и определить запас по фазе.
2. Определить, какой дополнительный фазовый сдвиг должно создавать корректирующее устройство.
3. Вычислить α по выражению sin φm = (α – 1)(α + 1).
4. Вычислить 10 lg α и найти на диаграмме Боде частоту ωn, при которой амплитудная характеристика нескорректированной системы имеет значение –10 lg α.
5. Провести прямую линию с наклоном – 20 дБ/дек, пересекающую уровень 0 дБ на частоте ωn, и продолжить ее влево до пересечения с амплитудной характеристикой нескорректированной системы, чтобы тем самым определить положение нуля корректирующего устройства. Затем вычислить положение полюса корректирующего устройства как q = α · z.
6. Построить диаграмму Боде для скорректированной системы и проверить полученное значение запаса по фазе. Если необходимо, выполнить повторно какой-либо из этапов.
7. Ввести в систему дополнительный усилитель, компенсирующий ослабление 1/α, вносимое корректирующим устройством.
8. Проверить результат синтеза, получив путем моделирования переходную характеристику системы. Если необходимо, выполнить повторно какой-либо из этапов.
При решении задачи будем использовать три программы. Первая программа предназначена для построения диаграммы Боде нескорректированной системы и выполнения 1–4 этапов процедуры синтеза (рис. 8.3).
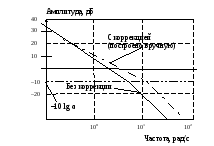
Рис. 8.3. Диаграмма Боде
Рис. 8.4. Скрипт MatLab для этапов 1–4
На рис. 8.5. и 8.6 приведены диаграмма Боде для скорректированной системы и программа, осуществляющая ее построение.
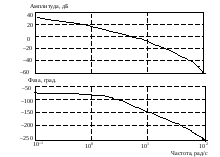
Рис. 8.5. Диаграмма Боде скорректированной системы –