

Хомяков Толкалин 12_end_3
.pdfНепрерывные гармонические сигналы в РЛС
|
̅ |
|
. |
|
|
|
с |
с |
рс |
|
с |
(3.16) |
|
(р |
р) |
|
|
. |
с |
р |
|
|
|||||
|
|
|
|
|
|
|
|
||||||
|
. |
с √ |
|
. |
с |
|
|
|
|
||||
Если предположить, что потенциальное разрешение по углу Δαр рав-
но: Δαр Qа/Осш, то формулой для расчете разрешающей способности может стать следующая:
|
|
|
. |
|
|
(3.17) |
р |
|
|
|
|
|
|
|
|
|
|
|
||
|
√ |
. |
|
|
||
|
с |
с |
||||
– где Осш – отношения сигнал/шум на входе приемника
Напоминаем, что Осш рассчитывается по принятой ранее модели шумов, приведенных ко входу приемника. Отношение учитывает его АЧХ и все последующие дополнительные фильтры.
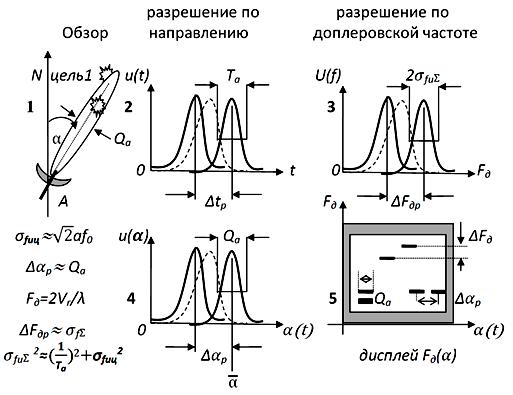
Форма (3.17) пригодится для расчета размера разрешаемой хорды ∆rα между двумя разрешаемыми по углам ∆αр целями (рис. 3.7).
∆ (Δ р) (3.18)
Примерное равенство (3.18) может оценить дистанцию между двумя движущимися по окружности целями, на которые они должны разъехаться, чтобы быть разрешаемыми за счет луча антенны угловой шириной Qa. По нему проведены расчеты, результаты которых даны на рис. 3.8. целей.
Из кривых рисунка можно получить представление о том, какое раз-
решение имеет РЛС в зависимости от ширины ДНА и дальности до цели. Конечно, чем уже луч антенны, тем разрешение лучше на всей дальности действия. Но сужение ДНА требует увеличения габаритов антенн или перехода в более коротковолновый диапазон радиоволн. При этом может быть потеряна дальность действия в соответствии с уравнением радиолокации.
101
Радиолокационные измерения
Рис. 3.7. Разрешение по направлению (по углу, Qa=2о)
3.3.2. Разрешение целей в двухантенной РЛС
Двухантенный радар может измерять дальности до целей, даже если они располагаются на одной линии цель – РЛС. Можно считать, что если удалось измерить дальности до двух целей, значит, цели были разрешены по дальности. Допустим, что дальность до одной из двух целей была измерена без погрешности, а до второй с погрешностью σR.
102

Непрерывные гармонические сигналы в РЛС
Рис. 3.8. Разрешение целей, движущихся вокруг РЛС
Погрешность зависит от ряда параметров: R, φ, σα, b, Осш.(формулы 3.10, 3.13). Остановимся на логическом представлении: цели будут раз-
решаться, если они на расстоянии ∆Rp, большем, чем два эффективных значения ошибок σα. Д а сс ы рас ре е е ий и к и мере-
иа ь сти плотностью w(R) можно получить:
Погрешность измерения направления:
сш (Qa / 2) /( uс / uш )
Погрешность измерения дальности до цели:
|
( |
с |
) |
√ |
|
|
( |
) |
|
|
|
||
Потенциальное разрешение ∆Rр |
|
|
|
|
|
|
|
∆ |
|
|
( 3.19) |
||
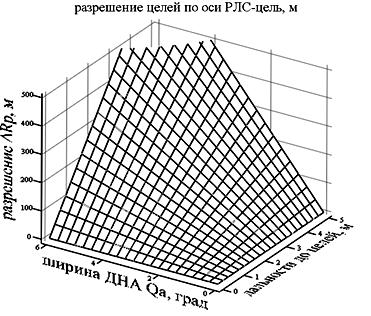
По (3.19) рассчитаны и построены кривые зависимостей разрешающей способности целей, расположенных на оси РЛС – цели.
103
Радиолокационные измерения
Расчеты велись для Осш=1, φ=450, b=1 м и даны на рис. 3.9.
Из рисунка очевидно, что радиальное разрешение пример но так же зависит от ширины ДНА и дальности, как и угловое на рис. 3.8.
И еще: для получения высокого разрешения по дальности на линии РЛС – цель, необходимы узкие диаграммы направленности антенн и хорошие отношения сигнал/шум.
Рис. 3.9. Разрешение на оси РЛС – цель
3.3.3. Разрешение по частоте
Часто конструкторам РЛС не удается разработать по техническому заданию двухантенный вариант. Заданные допустимые габариты станции не позволяют иметь большую апертуру антенны. В результате ши-
рина ДНА может получиться 4-6 градусов. Естественно, угловое разрешение невелико, а значит трудно определить, сколько целей находится в створе антенны. Тогда можно подменить разрешения по дальности
разрешением по частоте (рис. 3.10).
104

Непрерывные гармонические сигналы в РЛС
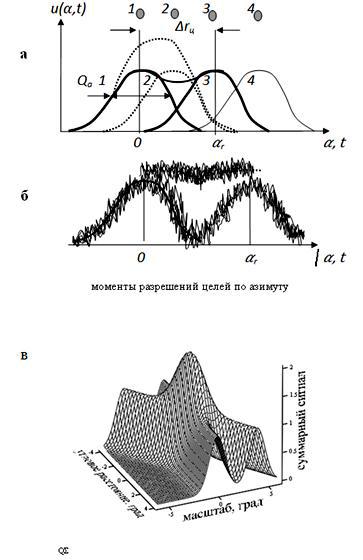
Рисунок как раз и иллюстрирует возможности непрерывного сигнала по разрешениям. В позиции 1) показано, как перемещающийся луч антенны А зондирует первую, потом вторую цель. Процесс зондирова-
ния цели приводит к появлению «пачки» отраженного сигнала, имеющего доплеровскую частоту Fд и огибающую u(t), которая выделяется на амплитудном детекторе приемника (номер 2). Огибающая повторяет диаграмму направленности антенны (ДНА) дважды: при передаче и приеме. В данном варианте взята гауссова модель огибающей сигнала,
подобная приведенной на рис. 1.5, с соответствующим спектром. Чтобы две цели не попадали в одну ДНА, необходим угловой разнос
между целями ∆Qа (вариант 4). Примерная величина его дана на рисун-
ке 3.10.
Появление огибающей непрерывного сигнала приводит к образова-
нию спектра U(f) огибающей амплитуд вокруг доплеровской частоты Fд. Значит, чтобы различать сигналы в спектральной области, необходим их спектральный разнос (рис. 3.10.1) на величину ∆Fд. Для выбран-
ной модели огибающей величина спектрального разноса приведена там же.
Формулы для расчета ширины спектра эмпирические и предназначены для инженерных оценок. Как было показано ранее, суммарный амплитудный спектр σfuΣ образуется за счет за счет амплитудно-
фазовых флюктуаций отраженного сигнала ( |
) а так е перемеще- |
|
ния луча антенны в пространстве ( |
). |
|
Процессы формирования спектров статистически независимы и могу
суммироваться в квадратуре. |
|
|
√ |
√ |
(3.20) |
105
Радиолокационные измерения
– где σ в Герцах, f0 в гигагерцах, b = 0.2÷5 коэффициент состоя-
ния цели (зависит от ее конструкции и динамики).
Рис. 3.10. Разрешение непрерывного синусоидального сигнала
На рис. 3.10.5 дан вид дисплея РЛС в координатах Fд, α. Вверху экрана цели разрешаются как по углу, так и по доплеровской частоте. Слева внизу цели попали в одну ДНА, но разрешаются по доплеровской частоте. Внизу справа разрешение только по угловым координатам. Это значит, что даже имея примитивный зондирующий сигнал,
можно решать задачи по распознаванию группировки целей. Больше того, такие сигналы достаточно узкополосны: при медленном обзоре пространства механической антенной эффективная ширина спектра лежит в пределах одного-трех десятков Герц. Поэтому разрешающая способность их достаточно велика. Не маловажен и тот факт, что допле-
ровские частоты истинные.
106
Непрерывные гармонические сигналы в РЛС
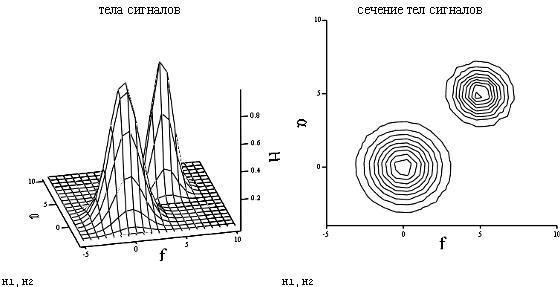
Графические пояснения рис. 3.11 можно сделать более наглядными, построив тела сигналов (рис. 3.12). Для построения тел введем понятие тела сигнальной функции H(f,α) (рис.3.12). Остановимся на гауссовых моделях как огибающих спектральных плотностей амплитуд U(f), так и огибающих сигналов u(α). Тогда тело сигнальной функции H(f,α). бу-
дет иметь следующий аналитический вид:
|
( |
) |
|
|
|
( |
|
) |
|
|
||||||
( |
) |
|
|
|
|
( ) |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
( |
) |
|
|
|
|
|
|
|
|
|
|
|
|||
|
( |
) |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
( |
) |
|
|
|
|
|
|
|
|
|
|
|
|
( . ) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
Рис. 3.12. Тела отраженных сигналов и их сечения
С использованием (3.21) и были построены два тела сигналов, показанные на рис. 3.12. Расчеты выполнены для Qa = 20, σf =10 Гц. Первое тело имеет Fд= 0, α ; второе Fд = 5Гц, α . Как видно из рисунков тела сигналов разрешаются по частоте и углам.
107
Радиолокационные измерения
Таким образом, даже при непрерывном гармоническом зондирующем сигнале можно организовать разрешение: угловое или доплеровское.
Причем, здесь скорости сближения Vr измеряются однозначно через Fд.
Надо заметить, что проведенный инженерный анализ позволяет выполнить оценку возможностей непрерывного синусоидального сигнала. Научные подходы дают возможность уточнить полученные результаты. Но они, как правило, отличаются не кардинально, и применяются чаще научными работниками.
Выводы к разделу 3.3:
1.В разделе показано, что угловое разрешение РЛС зависит от ширины ДНА и отношения сигнал/шум. Дан метод его оценки.
2.В двухантенной РЛС имеется возможность разрешения целей по дальности. Найден способ расчета и проведены оценки.
3.Относительно узкий спектр отраженных сигналов позволяет в одноантенной РЛС использовать разрешение целей по скоростям.
Контрольные вопросы к разделу 3.3:
1.От каких параметров зависит разрешение РЛС по направлению?
2.Может ли одноантенный радар определить количество целей по совокупному сигналу?
3.Имеет ли двухантенный радар возможность разрешения целей по дальности?
4.От каких основных параметров зависит разрешение РЛС по дальности?
IV. Дополнительные возможности
4.1.Прямое измерение дальности одноантенной РЛС
4.1.1Амплитудный маркер зондирующего сигнала
Как было отмечено выше прямое измерение дальности до цели при непрерывном зондирующем синусоидальном сигнале невозможно. Ну-
108
Непрерывные гармонические сигналы в РЛС
жен маркер непрерывного зондирующего сигнала. Можно периодически, с частотой Тп ≥ 2R/C, метить зондирующий сигнал неким марке-
ром. По задержке маркера отраженного сигнала относительно зондирующего несложно рассчитать дальность до цели.
В качестве маркера можно использовать периодические последова-
тельности сложных сигналов. Но это будут РЛС, излучающие не простой гармонический сигнал, а сложный, что выходит за рамки насто я- щего учебного пособия.
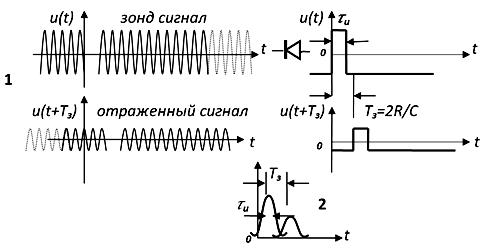
Простейшей маркировкой гармонического непрерывного сигнала может стать кратковременное выключение зондирующего сигнала на время τи. В эти моменты на выходе амплитудного детектора и усилителя образуется импульсный сигнал той же длительности.
Представленная на рис. 4.1 картина дает представление о том, как образуются видеоимпульсы и как можно измерить дальность до цели в амплитудном режиме работы приемника. Видеоимпульсы, изображенные в позиции 1 и способ измерения по фронтам – теоретические. Практически, пройдя через согласованные фильтры, прямоугольные импульсы станут колокольными. Тогда способ измерения целесообразнее делать по максимуму сигналов, поскольку фронты импульсов разной амплитуды обозначать трудно. Как и в импульсных радарах, реальные точности измерения в большой степени зависят как от длительности маркера, так и от отношения сигнал/шум. Последнее исключитель-
но важно.
4.1.2. Природа случайных ошибок амплитудного маркера
Измерение дальности до цели R в одноантенных радарах произво-
дится по временной задержке отраженного сигнала Тз во время его полета до объекта и обратно.
109
Дополнительные возможности
Рис. 4.1. Способ организации маркера |
|
Тз= 2 R/С |
(4.1) |
– где R – дальность, С – скорость света |
|
После прохождения отраженного сигнала в согласованном фильтре приемного устройства и систем первичной обработки прямоугольный сигнал приобретает вид «колокола». В простых дальномерах за точку отсчета выбирается максимальное значение импульса. В аппаратно-
программных – медиану фигуры. Но в том и другом случае выбросы электрических шумов приемного устройства могут исказить текущую геометрию отраженного сигнала. Тогда и возникают стохастические ошибки. Они тем больше, чем выше уровень шумов относительно полезного сигнала. На рис. 4.2 дана простейшая иллюстрация влияния шумов на погрешность измерения времени задержки отраженного сигнала.
Теоретически задержку сигнала Тз можно измерить предельно точно, если нет шумов и систематических ошибок, вплоть до истинного значения Тзис. Но шумовые всплески могут создать стохастические ошибки с эффективным значением στ.
110