

§ IV 3. Назначение величины радиусов в плане
Для обеспечения безопасности, удобства и экономичности движения с расчетными скоростями следует назначать величины радиусов кривых в плане на автомобильных дорогах исходя из наименьшего значения коэффициента поперечной силы р,
В трудных условиях рельефа или в густонаселенной местности, когда увеличение радиуса ведет к резкому возрастанию объема земляных работ или к необходимости сноса ценных строений, приходится допускать меньшие значения радиусов, обязательно обеспечивающие устойчивость автомобиля против заноса при движении с расчетной скоростью при благоприятном состоянии дороги, но вызывающие снижение удобства и экономичности пользования дорогой на участке кривой. Во всех случаях предельная допустимая величина действующей на автомобиль при проезде по кривой поперечной силы не должна превышать силы сцепления его колес с покрытием В противном случае произойдет занос и автомобиль будет сброшен с покрытия.
Поскольку для обеспечения безопасности движения необходимо, чтобы при проезде автомобиля по кривой имелся определенный запас устойчивости, для погашения поперечной силы можно использовать только часть полной величины поперечного сцепления шины с покрытием. Поэтому расчетная величина коэффициента поперечной силы,
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

назначаемая
исходя из комплексного учета требований
устойчивости автомобиля, удобства
управления, комфортабельности поездок
и экономичности перевозок, всегда
составляет лишь некоторую часть
коэффициента поперечного сцепления.
В
табл. IV. 1 сопоставлены допустимые
максимальные значения коэффициента
поперечной силы для различных требований
устончи* вости и использования автомобиля.
Расчетным
случаем при разработке норм на
проектирование дорог в СССР является
движение по увлажненному незагрязненному
покрытию. Обеспечить движение с
высокими скоростями цри гололеде или
по грязной поверхности покрытия
невозможно, так как при малейшей
неточности в регулировке тормозов и в
результате влияния поперечного
уклона дороги занос может возникнуть
даже при торможении на прямом участке.
При
относительно благоприятных условиях
местности для расчетов наименьшей
величины радиуса целесообразно
ориентироваться на значения ц = 0,05 —
0,1, принимая его тем меньшим, чем выше
расчетные скорости движения. В СНиП
П-Д.5-72 при определении минимальных
радиусов было принято р = 0,12 для расчетной
скорости 150 км/ч и |1 = 0,18 для скорости 20
км/ч.
Отечественные
нормы на проектирование автомобильных
дорог устанавливают следующие
значения допустимых в трудных условиях
радиусов кривых в плане в зависимости
от скорости движения по дороге:
Расчетная
скорость движения, км/ч
....
150 120 100 80 60 50 40 30
Категории
дорог
... I II III IV V — — —
Наименьшие
радиусы на трудных участках (ц =
=
0,14—0,15) ....
Ю00 600 400 250 125 100 60 30
Если
дорогу строят в открытой равнинной
местности, увеличение радиуса сокращает
ее длину и уменьшает строительные и
транспортные издержки. Потому в
благоприятных для проложения трассы
условиях рекомендуется назначать
возможно большие радиусы кривых, не
менее 3000 м, условия движения по которым
практически не отличаются от условий
на прямых участках. 70
Шллксы
Расстояние
от автомобиля,т
Рис.
1У,5.0евошенность дороги светом фар! В
— ширина земляного полотна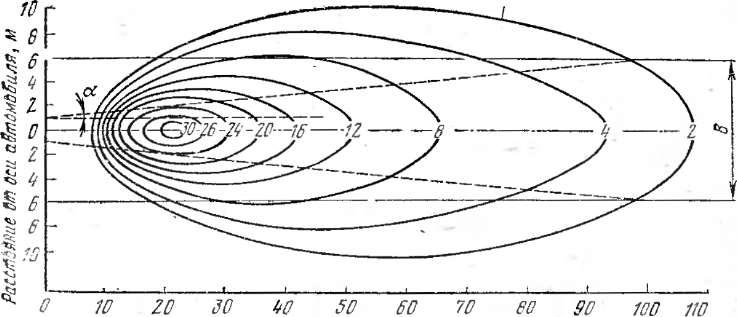
На
кривых малых радиусов часто не бывает
обеспечена безопасность движения е
расчетной скоростью в ночное время,
поскольку участок дороги, освещенный
фарами, оказывается меньше расчетного
расстояния видимости. Важность
удовлетворения требований безопасности
в ноЧное время подчеркивается тем
обстоятельством, что при интенсивности
движения ночью примерно в 10 раз меньшей,
чем днем, половина дорожно-транспортных
происшествий случается в темный период
суток.
Оптические
устройства фар концентрируют лучи света
в виде эллиптической фигуры, которая
может быть охарактеризована углом
раствора пучка света фар а, стягивающим
в пределах земляного полотна изолинию
минимальной допустимой освещенности
поверхности дороги, обычно принимаемую
равной 2 лк (рис. 1У.5).
Современные
фары дальнего света обеспечивают
видимость при отсутствии встречного
движения на расстоянии около 175, максимум
250 м, что меньше расчетных расстояний
видимости. Однако при проектировании
дорог, рассчитанных на использование
в течение Длительного времени, необходимо
ориентироваться на дальнейший прогресс
техники автомобилестроения,
предусматривая возможность рис.
IV.6.
Схема к определению ра- чидимости
на расчетное расстояние,
днуса кривой
из
условий освешенно-
Величина
радиуса И, при кото- с™
дороги светом
ФаР;
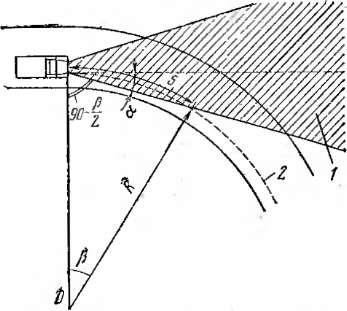
видимость дороги на кривой '"зова- 2~траек-
будет
соответствовать расчетному значению
видимости 3, может быть найдена из
следующих соображений (риск IV.6).
Центральный угол р, стягивающий дугу
длиной 5, равен (в градусах):
р=ЛЛ1. (IV.10)
лК
Поскольку
Р = 2а, то
с 28,65
К
— ,
а
или,
округляя
. (IV.11)
а
Рис.
1У.7. Схема к выводу уравнения
переходной
кривой: а
— нарастание центробежной силы
С
при непосредственном сопряжении прямой
и кривой; б—то
же, прн введении переходной кривой;
е—изменение скорости и ри-
внзны
в пределах переходной кривой; I —
круговая кривая;
2
— прямая; 3 — фактическое изменение
центробежной силы во время поворота
рулевого колеса;
4
— пере, ходная крнвая
Угол
раствора пучка света для современных
фар а — примерно 2°. Радиус кривых, при
которых свет фар освещает проезжую
часть па расстояние видимости (100—300
м), составляет от 1500 до 4500 м.
§
ГУ.4. ПЕРЕХОДНЫЕ КРИВЫЕ
В
момент въезда автомобиля с прямого
участка на кривую в плане условия
движения изменяются. Поскольку кривая
малого радиуса обеспечивает меньшую
безопасную скорость движения .чем
предшествующий ей прямой участок,
водители снижают скорость Наблюдения
показали, что скорость снижается на
всех кривых с радиусом менее 600 м. На
автомобиль начинает действовать
центробежная сила. Теоретически она
прилагается мгновенно, практически же
— в пределах короткого участка, на
котором водитель поворачивает рулевое
колесо.
Чтобы
изменения условий движения не
происходило слишком быстро, что неприятно
для пассажиров, а в неблагоприятных
погодных условиях может привести к
заносу автомобилей, между прямым
участком и кривой малого радиуса вводят
так называемую переходную
кривую,
в пределах которой кривизна оси 'дороги
плавно изменяется от 0 на прямом
участке
до ^ в начальной точке
круговой
кривой (рис. IV.7).
Для
вывода уравнения переходной кривой
примем, что режим движения автомобиля
и изменение действующих на него сил при
проезде переходной кривой удовлетворяют
следующим требованиям, обеспечивающим
удобство и
безопасность движения:
1.
Скорость автомобиля при въезде на кривую
снижается прямо пропорционально
продолжнтелоньсти проезда от опр
до »ир
с постоянным по величине допустимым
отрицательным ускорением:
т
гке Т — продолжительность проезда переходной кривой, имеющей длину Ь.'
2.
Центробежное ускорение возрастает
прямо пропорционально продолжительности
движения по переходной кривой, т. е.
(IV.
12)
где г — радиус в точке переходной кривой, через которую проезжает автомобиль спустя / секунд после въезда на кривую
Пусть
эта точка будет расположена на расстоянии
I от начала переходной кривой.
Определим
вначале значения параметров а и ,/.
Из
условия равномерно замедленного движения
продолжительность проезда переходной
кривой, имеющей длину /-.'
Т=
—— , откуда а- . (]у.13)
Упр
+ ^кр Т 21
Параметр
,/ может быть определен подстановкой в
уравнение (IV. 12) данных для конца переходной
кривой 1>г
= кнр,
г — Я.
и
I
—
Т.
Это
приводит к выражению
(IV.
14)
2Я/,
Для
промежуточной точки переходной кривой,
согласно уравнению XIV. 12)
=
7 ; (]у.
15)
г а
Подставляя
в это выражение значения У
и
а из уравнений (IV. 13)
и (IV.14),
получаем, что
_ о' (Цдр —Икр) К
[кг, (''лр—Ог)
Учитывая
по аналогии с уравнением (IV. 13), чтп ю, =
1А>пР
— 2а/
и
вводя обозначения — = и; =
у, — — х,
получаем после преобра- гКр И г
зованнй
искомое уравнение переходной кривой;
(л —I) [л2 — х(п2— 1)1
У
= " —
. (IV. 16)
п— у пг — х(п*—1)
Переходную
кривую, описываемую этим уравнением,
называют тормозной
кривои.
Она хорошо соответствует фактическим
траекториям движения автомобилей
прЛ въездах на кривые малых радиусов с
торможением и выездах с кривых с
ускорением. Ее применение особенно
целесообразно на примыканиях дорог,
пересечениях дорог в разных уровнях,
на кривых малых радиусов горных дорог,
на участках с недостаточной видимостью.
г
=На
автомобильных дорогах I—III категорий
автомобили проезжают кривые без снижения
скорости. В этнх случаях применяют
переходные кривые несколько иного
очертания. Их уравнение можно получить,
приняв в уравнении (IV. 16)
п
= 1, т. е. опр
= к|1р,
что после раскрытия неопределенности
приводит к уравнению-
или
С = П. (IV
17)
Выражение
(IV. 17) представляет собой уравнение
клотоиды
(ра- диоидалыюй спирали, раднонды, спирали
Корню) —основной переходной кривой,
применяемой на современных автомобильных
дорогах6.
Радиус
кривизны клотоиды возрастает обратно
пропорционально ее длине. Если к
переходной кривой не предъявляются
пециальные требования обеспечения
зрительной плавности трассы (см § XII.3),
то длин) ее назначают исходя из условия,
чтобы центробежная сила нарастала
во время проезда кривой достаточно
замедленно, не вызывая неприятных
ощущений у пассажиров. Для этого скорость
нарастания центробежного ускорения У
!см. уравнение (IV.14)1 должна быть ниже
значений, вызывающих неприятные ощущения
пассажиров.
При
разработке технических условий различных
стран величину ^ принимают в пределах
от 0,3 до 1 м/с7.
Нормы на проектирование дорог СССР
исходят из величины У = 0,8 м/с3,
что близко соответствует фактическим
режимам движения на дорогах.
Время
проезда переходной кривой, в течение
которого величина
центробежного
ускорения равномерно возрастает от
нуля до , состав-
к
ляет
I = ру (где V— скорость автомобиля, м/с).
Отсюда
необходимая длина переходной кривой
(в м):
или,
выражая скорость
V в
км/ч, получим (в м):
7 <1У18>
По
действующим в СССР нормам переходные
кривые устраивают на дорогах всех
категорий на кривых с радиусами менее
2000 м:
Радиусы
круговых кривых, м
10060
100 200 300 500 600—1000 1000-200040
50 70 90 ПО 120Длина
переходных кривых, м
Приведенные
длины переходных кривых следует
рассматривать как минимально допустимые.
Нормативную длину переходных кривых
целесообразно увеличивать в 1,5—2 раза,
поскольку это придает трассе дороги
зрительную плавность, способствующую
проезду кривой без снижения скорости.
При
проектировании автомобильных дорог,
предназначенных для движения с высокими
скоростями, переходные кривые превращаются
из вспомогательного элемента кривых
малых радиусов в самостоятельный
элемент трассы дороги в плане и профиле,
равноправный с прямыми и кривыми
(см. § 11.1).
где
С = ЯЬ\ I — длина участка кривой,
соответствующего координатам х
и
у.
Ряды для
хну
быстро сходятся, и при составлении
таблиц обычно пользуются двумя
первыми членами уравнений (IV. 19).
42240С"'
3456С4
![]()
(IV.
19)Кроме
клотоиды, при проектировании автомобильных
дорог для разбивки переходных кривых
иногда применяют уравнения других
кривых, в общем удовлетворяющие
требованиям за тономерного изменения
кривизны. Наибольшее распространение
после клотоиды имеют: кубическая
парабола — кривая, у которой радиус
кривизны обратно пропорционален
абсциссе ;
![]()
лемниската
Бернуллн — кривая, у которой радиус
обратно пропорционален длине хорды
а, стягивающей начало координат с
рассмат-
![]()
риваемой
точкой на кривой (р =
Различие
в ординатах переходных кривых,
рассчитанных по разным формулам,
часто находится в пределах точности
разбивки и меньше, чем возможные
отклонения автомобиля при движении от
средней траектории движения. Раньше
уравнения переходной кривой выбирали
преимущественно из соображений удобства
составления таблиц для разбивки. В
настоящее время в связи с использованием
для этой цели электронных вычислительных
машин, указанные соображения потеряли
свое значение. В СССР, как и в других
странах, наибольшее распространение
получила разбивка переходных кривых
по клотоиде (рис. IV.8), исходные предпосылки
о режиме движения автомобилей, по
которой наиболее логичны.
Уравнение
клотоиды в прямоугольной системе
координат имеет вид
:
Рис.
1У.8. Переходная кривая по клотоиде)
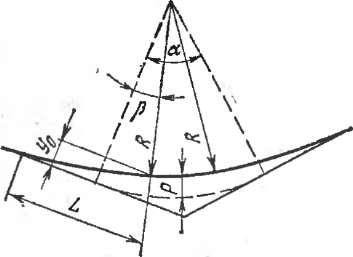
Рис.
1У.9. Смещение основной кривой при
введении переходных кривых, I*
— переходная кривая
О
Переходные
кривые по клотоиде имеют следующие
особенности: угол (в радианах), образуемый
касательной к клотоиде в точке ее
сопряжения с круговой кривой,
характеризуется длиной кривой Ь
и
радиксом
_
1> с
'
если
между двумя клотоидами соблюдаются
соотношения = —кЬ2,
= /г/?2и]/Сх
= /г]/Са(где&
— коэффициент пропорциональности),
то они геометрически подобны. Это дает
принципиальную возможность, составив
таблицы для разбивки переходной кривой
при С = 1, пользоваться ими при любых
значениях
С,
умножая абсциссы и ординаты
соответствующих точек на ]/С.
Введение
переходных кривых вызывает смещение
основной круговой кривой внутрь угла
(рис. IV.9). Это обстоятельство должно
учитываться при назначении углов
поворота и радиусов кривых, так как
величина
биссектрисы увеличивается на величину
сдвижки кривой внутрь угла
Р=у0-К(1
-С05Р),
(IV.20)
где
г/0
— ордината переходной кривой в точке
примыкания к круговой
-
й- 1
крипои;
р = —— радиан.
-А'
Часть
основной круговой кривой при этом
заменяется переходной кривой. Согласно
рис. 1У.9, разбивка переходной кривой
возможна лишь при условии 2р < а.
Если это условие не соблюдается, 76должна
быть уменьшена длин:: переходной кривой
или увеличен радиус К.
Иногда
считают, что введение переходных кривых
сгановшся излишним, если величина
сдвижки меньше 0,2 м.