

теорет.механика
.pdfƏЛ-ФАРАБИ АТЫНДАҒЫ ҚАЗАҚ ҰЛТТЫҚ УНИВЕРСИТЕТІ
Абишев М.Е., Бейсен Н.Ə.
Теориялық механика лекцияларының конспектісі
АЛМАТЫ 2009
Абишев М.Е., Бейсен Н.Ə.
Теориялық механика лекцияларының конспектісі:
Мамандықтары: 050604-Физика; 050605-Ядролық физика.
Кітапта қысқа əрі түсінікті түрде «Теориялық механика» пəні бағдарламасының тақырыптары баяндалады. Жоғары оқу орындарының «Физика», «Ядролық физика» жəне т.б. мамандықтар студенттеріне арналады. Өткен тақырыптарды қайталау, емтиханға дайындалу үшін көмекші құрал ретінде ұсынылады.
Қаз. т. 8 б.т. Таралымы 200. 4 тоқсан.
|
Мазмұны |
|
I ҚОЗҒАЛЫС ТЕҢДЕУЛЕРІ |
5 |
|
1 Кіріспе |
5 |
|
2 Жалпылама координаттар. Координаттық беттер, сызықтар. Ламэ |
|
|
коэффициенттері. Координаттардың ортогональды жүйесі |
7 |
|
3 Қисықсызықты қозғалыс жылдамдығы |
10 |
|
3.1 Жылдамдықтың радиал жəне трансверсаль құраушылары |
12 |
|
3.2 Нүкте жылдамдығының полярлық координаттарда жазылуы |
13 |
|
4 Механиканың заңдары. Галилейдің салыстырмалық принципі. |
|
|
Инерциалды санақ жүйелері. Механиканың детерминизмі. Ньютонның |
|
|
қозғалыс теңдеулері |
14 |
|
5 Бірінші, екінші қозғалыс интегралдары |
18 |
|
6 Еркін материалдық нүктенің Лагранж функциясы. Материалдық |
|
|
бөлшектер жүйесінің Лагранж функциясы. Ең аз əсер принципі немесе |
|
|
Гамильтон принципі. Лагранж теңдеулері жəне ең аз əсер принципі |
21 |
|
7 Гамильтон функциясы. Оның физикалық мағынасы. Гамильтонның |
|
|
ең аз əсер принципінен оның канондық теңдеулер жүйесін қорытып |
|
|
шығару |
26 |
|
II САҚТАЛУ ЗАҢДАРЫ |
30 |
|
8 Импульстің, импульс моментінің, энергияның сақталу заңдарының |
|
|
кеңістік пен уақыт симметрияларымен байланысы. |
30 |
|
8.1 Энергияның сақталу заңы |
30 |
|
8.2 Импульстің сақталу заңы |
32 |
|
8.3 Импульс моменті сақталу заңы |
33 |
|
9. Инерция центрі. Келтірілген масса. |
36 |
|
III ҚОЗҒАЛЫС ТЕҢДЕУЛЕРІН ИНТЕГРАЛДАУ |
42 |
|
10 |
Бір өлшемді қозғалыс |
42 |
11 |
Орталық өрістегі қозғалыс. Аудандар заңы |
44 |
12 |
Кеплер есебі |
48 |
IV БӨЛШЕКТЕРДІҢ СОҚТЫҒЫСУЫ |
54 |
|
13 |
Бөлшектердің ыдырауы |
54 |
14 |
Бөлшектердің серпімді соқтығысы |
60 |
15 |
Бөлшектердің шашырауы |
68 |
V АЗ ТЕРБЕЛІСТЕР |
75 |
|
16 |
Бір өлшемді еркін тербелістер |
75 |
17 |
Мəжбүр тербелістер |
78 |
18 |
Өшетін тербелістер |
81 |
19 |
Үйкеліс бар кездегі мəжбүр тербелістер |
84 |
20 |
Ангармониялық тербелістер |
85 |
VI ҚАТТЫ ДЕНЕ ҚОЗҒАЛЫСЫ |
88 |
|
21 |
Абсолют қатты дене. Оның еркіндік дəрежелері. Абсолют қатты |
|
дененің координаттары. Эйлер бұрыштары |
88 |
|
22 |
Бұрыштық жылдамдық. Жалпы бұрыштық жылдамдықтың |
|
қозғалыстағы санақ жүйесінің өстеріне проекциялары |
90 |
|
3
23 |
Абсолютті қатты дененің инерция тензоры. Инерцияның бас өстері |
95 |
24 |
Қатты дененің импульс моменті |
99 |
25 |
Қатты дененің қозғалыс теңдеулері |
102 |
26 |
Бір нүктесі бекітілген абсолютті қатты дене үшін Эйлердің |
|
қозғалыс теңдеулері |
105 |
|
27 |
Инерциалды емес санақ жүйелеріндегі қозғалыс |
108 |
VII ГАМИЛЬТОН-ЯКОБИ ТЕҢДЕУІ |
113 |
|
28 |
Пуассон жақшалары. Пуассон жақшаларының қасиеттері. Якоби |
|
теңдігі |
113 |
|
29 Гамильтон-Якоби теңдеуі. Оның математикалық құрылысы. Толық |
|
|
интегралы |
115 |
|
30 |
Айнымалыларды ажырату тəсілі |
119 |
Пайдаланылған əдебиеттер тізімі |
126 |
|
4
I ҚОЗҒАЛЫС ТЕҢДЕУЛЕРІ
1 Кіріспе
Теориялық механика – механикалық қозғалыс пен материалдық денелердің өзара механикалық əсерлесуінің ортақ заңдылықтары жайындағы ғылым.
Теориялық механика техникамен тығыз байланысты. Оның əр түрлі салалары архитектурада, инжерлік ғылымдарда кеңінен пайдаланылады.
Қозғалыс деп, жалпы айтқанда, материяның өмір сүру формасын айтады. Ол бүкіл əлемдегі өзгерістер мен процестерді қамтиды. Яғни, қозғалыс деп материяның күйінің өзгерісін айтамыз. Материяның күйі ұғымы оны толығымен сипаттайтын шамалардың жиынымен анықталады. Механикалық күй – механикалық (материалдық) бөлшекті толығымен сипаттайтын шамалардың жиыны. Теориялық механика қозғалыс формаларының бірі – механикалық қозғалысты зерттейді. Яғни механикалық қозғалыс деп дененің уақыт өтуімен байланысты өзінің кеңістіктегі орнын басқа денелермен салыстырғанда өзгертуін айтамыз. Одан ары қарай «қозғалыс» деген терминді механикалық қозғалыс деп қабылдауға келісіп алайық.
Механиканың ең негізгі зерттеу объектісі – материалдық бөлшек. Қарастырылып отырған жағдайда өлшемдері мен пішінін ескермеуге болатын денені материалдық бөлшек деп атаймыз. Нүктенің өлшемі мен пішіні жоқ болғандықтан материалдық бөлшек орнына материалды н кте деген атау да қолданылады.
Классикалық механикада (негізін салушылар – Галилей, Ньютон) денелердің қозғалыс күйін өзгертетін сыртқы əсер мен өзара механикалық əсерлесуді сипаттау үшін к ш ұғымы енгізіледі. Механикалық əсер арқылы дене қозғалысқа келеді (қозғалыс күйі өзгереді) немесе деформацияға ұшырайды (осы денелерді құрайтын бөлшектердің өзара орналасуы өзгереді). Сонымен, күш материалдық денелердің өзара əрекеттесуінің өлшемі болып табылады.
Дененің қозғалысын тудыратын күш – сыртқы фактор болып табылады. Сонымен қатар, дененің қозғалысы оның қозғалыс күйін өзгертуге қарсыласу қабілетін сипаттайтын ішкі фактор – инерттілік дəрежесіне де тəуелді болады. Себебі, дененің инерттілігі неғұрлым жоғары болса, соғұрлым сыртқы күштің əсерінен болатын қозғалысы баяу болады (немесе керісінше) деуге болады. Материалдық дененің инерттілігінің өлшемі ретінде заттың мөлшеріне тəуелді масса деген шаманы алады.
Сонымен, классикалық механиканың негізін қалаушы ұғымдарға: қозғалыстағы материя (материалдық денелер), қозғалыстағы материяның өмір сүру формасы болып табылатын кеңістік пен уақыт, материалдық дененің инерттілік өлшемі ретінде – масса жəне денелердің арасындағы механикалық əрекеттесудің өлшемі – күш жатады.
Механиканы кинематика жəне кинетика деп бөлуге болады. Кинематикада дененің қозғалысы тек геометриялық тұрғыдан қарастырылады, яғни қозғалысқа себеп болатын əсер немесе күш ескерілмейді.
5
Кинетика материалдық денелердің қозғалысын əсер етуші күшті ескере отырып қарастырады жəне статика (күштің əсерінен дененің тепе-теңдікте болуы) жəне динамика (күштің əсерінен болатын дененің қозғалысы) болып екіге бөлінеді. Динамикада денеге əсер еткен күш арқылы осы дененің қозғалысын табу немесе керісінше, берілген қозғалыс арқылы ол денеге əсер етуші күштерді табу сияқты теориялық механиканың есептері қарастырылады.
Кинематика дененің қозғалысын тек геометриялық тұрғыдан, яғни қозғалысқа себеп болатын əсер немесе күшті ескермей қарастыратын болса, оның геометриядан айырмашылығы бар ма? Шынында да, кинематиканың геометриядан айырмашылығы – мұнда денелердің кеңістіктегі орнын ауыстыруын қарастырғанда орын ауыстыруға кеткен уақытын да ескеру керек болады. Сондықтан кинематиканы кейде, төртінші өлшемі уақыт болып табылатын, «төрт өлшемді геометрия» деп те атайды.
Классикалық механикада (Ньютон механикасында) кеңістіктің метрикалық қасиеттері ондағы қозғалыстағы материямен байланыссыз. Мұнда кеңістік – біртекті жəне изотропты үш өлшемді евклидтік кеңістік ретінде қарастырылады. Сол сияқты Ньютон механикасында уақыт та қозғалыстағы материямен байланысы жоқ, абсолютті, яғни, кеңістіктің кез келген нүктелерінде уақыт бірдей жүреді.
Үш өлшемді евклидтік кеңістік жəне абсолют уақыт – кеңістік пен уақыттың нақты қасиеттерін тек жуықтап көрсетеді. Бірақ осы жуықтаудың өзі Ньютон механикасы көлемінде қозғалыстың заңдылықтарын жеткілікті дəрежеде береді, себебі мұндағы қарастыратын денелердің қозғалыс жылдамдықтары жарықтың жылдамдығынан едəуір аз болады. Денелердің қозғалыс жылдамдықтары жарықтың жылдамдығымен салыстыруға келетіндей жағдайларда арнайы салыстырмалық теориясы негізінде жасалған релятивтік механиканы қолданады. Қозғалысты арнайы салыстырмалылық теориясында зерттегенде кеңістік пен уақыттың қозғалыстағы материямен өзара байланысын ескеру қажет.
Ұзындықты кеңістікте өзара келісіп алынған ұзындық бірлігі – метрмен (м) өлшейді.
Ал уақытты қандай да бір периодты түрде қайталанып отыратын процестерді қолданып сағатпен өлшейді. Жердің өз осінен айналуы, Жердің Күнді айнала қозғалуы сияқты периодты астрономиялық құбылыстарды уақытты өлшеу үшін қолданады. Уақыттың өлшем бірлігі секунд (с).
Қарастырып отырған кез келген денені өте көп, өлшемдері шексіз аз материалдық бөлшектерден (нүктелерден) тұрады деп есептейді. Яғни кез келген дене өзара байланысқан материалдық нүктелердің жиыны деуге болады. Кинематикада дененің қозғалысы геометриялық тұрғыдан түсіндіріліп, материалдық нүктелердің массасы есепке алынбайды да, олар тек геометриялық нүкте ретінде қарастырылады. Кез келген екі нүктесінің арақашықтығы қозғалыс жəне əсерлесу кезінде тұрақты болып қалатын дене абсолют атты дене деп аталады. Дененің əсерлесуі мен қозғалысын қарастырғанда оны абсолют қатты деп алу ыңғайлы болады. Себебі бұл жағдайда дененің деформациясын ескермейміз.
6
Кеңістікте берілген дененің орнын белгілі бір санақ жүйесіне қатысты анықтайды. Санақ жүйесі санақ денесі жəне сонымен қандай да бір заңдылықпен байланысқан координаттар жүйесінен құралады. Санақ денесі ретінде қарастырылып отырған қозғалысты сипаттауға ыңғайлы болатын, уақыт өте өзгермейтін денені таңдап алады. Яғни, қарастырылып отырған объектінің қозғалыс күйін анықтау үшін санақ денесі мен координаттар жүйесін таңдап алу қажет. Егер дененің орны таңдап алған санақ жүйесіне қатысты өзгермесе, онда бұл дене осы берілген санақ жүйесіне қатысты тыныштықта болады. Ал егер дененің орны осы таңдап алған санақ жүйесіне қатысты өзгерсе, онда бұл дене осы берілген санақ жүйесінде қозғалады. Дене берілген санақ жүйесіне қатысты қозғалғанда оның траекториясын кеңістікте сызып көрсетуге болады. Анықтама бойынша траектория үздіксіз, жазық немесе кеңістіктік қисық болып табылады.
Дененің орнын таңдап алған санақ жүйесіне қатысты кез келген уақыт мезетінде анықтай алсақ, оның қозғалысы белгілі деп есептейміз. Ал дененің орны сəйкес параметрлер (координаталар) арқылы таңдап алған санақ жүйесінде анықталады да, қозғалыс заңдары теңдеулер арқылы жазылады.
Нүктелер жиынының қозғалыс теңдеулері арқылы осы қозғалыстың бүкіл сипаттамаларын анықтау (əр түрлі нүктелердің траекториясын, жылдамдығын, үдеуін жəне т.б.) кинематиканың негізгі есептерінің бірі болып табылады. Егер нүктелер жиынын құрайтын əрбір нүктенің қозғалысы осы таңдап алған санақ жүйесінде белгілі болса, онда кез келген нүктелер жиынының қозғалысын да анықтауға болады. Осылайша кинематика нүкте кинематикасы жəне жүйе кинематикасы болып екіге бөлінеді.
Нүктенің қозғалысын анықтау дегеніміз осы нүктенің орнын кез келген уақыт моментінде таңдап алынған санақ жүйесіне қатысты анықтау болып табылады.
Б а қ ы л а у с ұ р а қ т ар ы
1.Теориялық механика нені зерттейді?
2.Материалдық нүкте дегеніміз не?
3.Механиканың қандай салалары бар?
4.Абсолют қатты дене дегеніміз не?
5.Санақ жүйесі дегеніміз не?
2 Жалпылама координаттар. Координаттық беттер, сызықтар. Ламэ коэффициенттері. Координаттардың ортогональды жүйесі
Қарастырылып отырған есептің симметриясына қарай декарттық, сфералық, цилиндрлік, параболалық, эллипстік жəне т.б. координаттар жүйелерін қолдану ыңғайлы. Сонымен қатар үш өлшемді кеңістікте есептер шығару кезінде декарттық координаттар жүйесінен көбінесе қисықсызықты координаттар жүйелеріне көшіп отырамыз. Үш өлшемді эвклидті кеңістікте тікбұрышты координаталар (x, y, z) жүйесімен бірге бастапқы нүктелері ортақ
7
қисық сызықты (q1 ,q2 ,q3 ) координаталар жүйесін де енгіземіз. Яғни декарттық координаталар жүйесімен қоса қисықсызықты координаттар жүйесінің жиынтығын qi жалпылама координаттар жүйесі деп атайды. qi координатасының уақыт бойынша туындысы qɺi жалпылама жылдамды деген ұғымды береді.
Осы жүйелердің координаттарының арасындағы өзара байланысы:
q |
= q (x, y,z) |
|
1 |
1 |
(1) |
q2 = q2 (x, y,z) |
||
|
= q3 (x, y,z) |
|
q3 |
|
|
Осы теңдеулерді декарттық координаттар жүйесінде жалпылама координаттар жүйесі арқылы шешу үшін (1) түрлендірулердің якобианы нольден өзгеше болу керек:
|
¶qi |
|
|
|
|
|
¹ 0 |
||
|
||||
I |
|
|
||
|
¶xk |
|
||
Ол үшін (1) қасиеті мынадай болу керек
x = x(q1 ,q2 ,q3 )
y = y(q1 ,q2 ,q3 )
z = z(q1 ,q2 ,q3 )
(2)
(3)
яғни аргументтері бойынша шешілу керек.
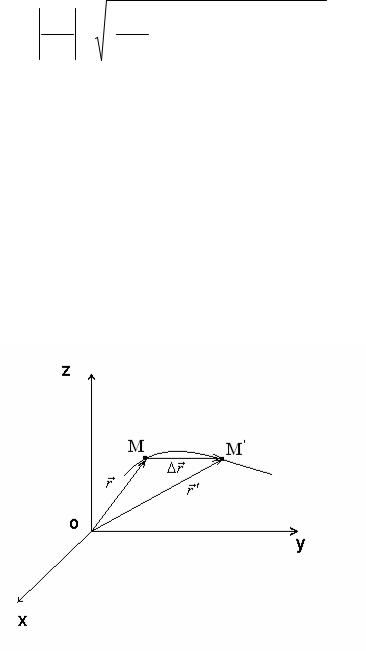
Сонымен, кеңістікте берілген кез келген нүкте не (x, y, z) немесе (q1 ,q2 ,q3 ) координаталарымен анықталады. Егер координаттар жүйесінің басынан осы нүктеге дейін радиус вектор жүргізсек:
|
|
|
+ zk |
(4) |
r |
= xi |
+ yj |
немесе қысқаша былай да жазуға болады:
r = r (x, y,z) |
(5) |
i, j ,k – координаттардың өсу бағытын көрсететін бірлік векторлар.
Жалпылама координаттар жүйесі үшін де радиус векторды сəйкес координаталар арқылы жазуға болады:
r = r (q ,q |
2 |
,q |
3 |
). |
(6) |
1 |
|
|
|
8
Үш координаттың біреуі тұрақты qi = ci , i = 1,2,3 болғанда қалған екеуі айнымалы болып қалады да, координаттық бетті сызады. Декарттық координат жүйесі жағдайында бұл координаттық бет жазықтық болып табылады. Екі координаттық беттердің қиылысуынан координаттық сызықтар пайда болады. Оларды кейде сəйкесінше q1 ,q2 ,q3 сызықтар деп атайды. Мысалы, декарт координаттар жүйесінде ол сызықтар түзу болады да, түзу сызықты координаттар жүйесі деп аталады. Ал басқа координаттар жүйелерінде ол сызықтар қисық сызықты болып, олар исы сызы ты координаттар деп аталады.
Берілген координаттар жүйесінің осьтерінің оң бағытын көрсететін бірлік
векторлар e1 ,e2 ,e3 енгіземіз. |
Ал бір-біріне |
шексіз |
жақын орналасқан |
екі |
|||||
нүктенің арақашықтығының квадратын көрсетсек: |
|
|
|
||||||
2 |
|
3 3 |
¶r |
¶r |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
ds |
|
× |
|
× dqm |
× dqn , |
(7) |
|||
= (dr × dr ) = ∑ ∑ |
|
|
|||||||
|
|
m=1n=1 |
¶qm |
¶qn |
|
|
|
||
мұндағы
|
|
|
|
|
∂r |
|
|
|
|
|
|||
|
|
|
|
|
|
= h |
×e |
m |
|
(8) |
|||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
m |
|
|
|
|
|||
|
|
|
|
|
¶qm |
|
|
|
|
|
|
||
себебі |
∂r |
– q |
m |
координаттық сызығы жанамасымен бағытталған. |
|
¶r |
|
= h |
|||||
|
|
||||||||||||
|
|
||||||||||||
|
¶qm |
|
|
|
|
|
|
|
¶qm |
|
m |
||
|
|
|
|
|
|
|
|
|
|
|
|||
дербес |
туындысының модулі qm координатасының өлшем бірлігіне сəйкес |
||||||||||||
келетін сызықты элементтердің мөлшері болып табылады жəне біз оны Ламэ коэффициенттері деп атаймыз.
(8) ні (7) ға қойып, мынаны аламыз
3 |
3 |
(емет )× dqm |
|
|
ds2 = ∑ ∑ hm hn |
× dqn . |
(9) |
||
m=1n=1
Координаттық сызықтары өзара ортогональ болып келетін (яғни кез келген нүктеде координаттық сызықтар өзара перпендикуляр қиылысатын) координаттық жүйелерді ортогоналды деп атайды. Олар мына шартты қанағаттандыратын болуы керек:
(emen ) = δ mn , |
|
(10) |
|
сондықтан |
|
|
|
3 |
|
|
|
ds2 = ∑ hm2 dqm2 |
= h12 dq12 + h22 dq22 |
+ h32 dq32 . |
(11) |
m=1
9
Яғни ортогоналды координаттар жүйесінде ds2 өрнегіне координаттардың дифференциалдарының квадраттары ғана енеді.
Осындай жүйеде көлемнің шексіз аз элементі:
dV = h1 × h2 × h3 × dq1 × dq2 × dq3 . |
(12) |
Мысал ретінде айтатын болсақ, біз білетін декарттық, сфералық, цилиндрлік координаттар жүйелері ортогоналды координаттар жүйелеріне жатады.
(8) жəне (10) ескере отырып:
hm = ∂∂r qm
=∂x 2
∂qm
|
∂y |
2 |
|
∂z |
2 |
|
|
|
|
|
|
(13) |
|||
|
|
||||||
+ |
|
|
+ |
|
. |
||
|
∂qm |
|
∂qm |
|
|||
Осы арқылы, егер (1) координаттық түрлендірулері белгілі болса, Ламэ коффициенттерін кез келген координаттық жүйеде анықтай аламыз.
Б а қ ы л а у с ұ р а қ т ар ы
1.Жалпылама координаттар жүйесі дегеніміз не?
2.Координаттық бет жəне координаттық сызық дегеніміз не?
3.Ортогоналды координаттық жүйелер дегеніміз не?
4.Ламэ коффициенттері дегеніміз не?
5.Жалпылама координаттар жүйесіндегі көлемнің шексіз аз элементі
3 Қисықсызықты қозғалыс жылдамдығы
1 – сурет
10