

1.3. Симплекс – метод решения
В п. 1.2 был рассмотрен графический метод решения ЗЛП. В общем случае, каждое ограничение из (1.2) есть уравнение гиперпространства n – мерного пространства с граничной гиперплоскостью
![]() .
.
Гиперплоскость, ввиду совместности системы образует общую часть, которая называется многогранником решений. Координаты угловых точек многогранника есть опорные планы ЗЛП. Оптимальные планы определяются из опорных.
При n>3 получить оптимальный план графическим или перебором опорных становится практически неразрешимой задачей.
Симплекс – метод 1 представляет собой итеративную (пошаговую) процедуру, позволяющую за конечное число шагов (их максимальное число равно n-m+1, m – число ограничений в системе (1.2)), последовательно улучшая опорные планы, либо аналитически оптимальный план ЗЛП, либо убедиться, что задача оптимальным планом не обладает.
Основная идея симплекс – метода состоит в следующем. Каждый опорный план определяется базисом из m линейно – независимых векторов. Если план не оптимален, то необходимо выбрать другой базис. Для этого, из старого базиса исключается один из базисных векторов и на его место включается один из бывших небазисных. Тем самым, производится переход от одного базиса к другому, и, следовательно, от одного опорного плана к другому.
Симплекс – методом можно решать только те задачи, у которых:
система ограничений (1.2) содержит только равенства;
число уравнений в (1.2) не больше числа переменных в целевой функции (1.1),
 ;
;столбец свободных членов (1.2) не содержит отрицательных чисел,
 .
.
Алгоритм симплекс - метода рассмотрим на задаче из примера 1.1.
Пример 1.1. Решить ЗЛП из примера 1.1 симплекс – методом.
Алгоритм решения злп симплекс – методом
Шаг 1. Определение возможности решения ЗЛП симплекс – методом.
Для того, чтобы
ЗЛП решить симплекс – методом, необходимо
в системе (1.3) от неравенств перейти к
равенствам. Для этого, вводим фиктивные
переменные
![]() ,
,![]() ,
,![]() .
Получаем расширенную ЗЛП:
.
Получаем расширенную ЗЛП:
![]() ;
;
Эта задача может быть решена симплекс – методом, так в ней число переменных 5 больше числа ограничений 3 и столбец свободных членов содержит только положительные числа.
Шаг 2. Получение канонической формы записи ЗЛП.
В нашем случае каноническая форма записи ЗЛП имеет вид:
![]() ;
;
 (1.4)
(1.4)
Шаг 3. Определение базиса.
Определим векторы
![]() -
-![]() ,
координаты которых соответствуют
столбцу коэффициентов при неизвестных
в системе (1.4):
,
координаты которых соответствуют
столбцу коэффициентов при неизвестных
в системе (1.4):
![]() ,
,
![]() ,
,![]() ,
,![]() ,
,![]() .
.
Система (1.4) содержит m=3 ограничения, поэтому среди векторов
![]() -
-
![]() необходимо в качестве базисных выбрать
три вектора. Поскольку векторы
необходимо в качестве базисных выбрать
три вектора. Поскольку векторы![]() ,
,![]() и
и![]() - единичные, то они очевидно образуют
базис (именно в такой последовательности!)
трехмерного пространства.
- единичные, то они очевидно образуют
базис (именно в такой последовательности!)
трехмерного пространства.
Переменные
![]() ,
номера которых соответствуют базисным
векторам, назовем базисными, а остальные
приравняем к нулю,
,
номера которых соответствуют базисным
векторам, назовем базисными, а остальные
приравняем к нулю,
![]() ,
,
![]() ,
,![]() - базисные переменные,
- базисные переменные,
![]() .
(1.5)
.
(1.5)
Коэффициенты
линейной функции, номера которых
совпадают с номерами базисных векторов,
также назовем базисными. Будем представлять
их в виде набора, обозначаемого ![]() .
В нашем случае
.
В нашем случае
![]() .
.
Шаг 4. Определение начального опорного плана.
Подставим (1.5) в (1.4) и решим систему:
 ,
, ,
, ,
,
![]() ,
,
![]() ,
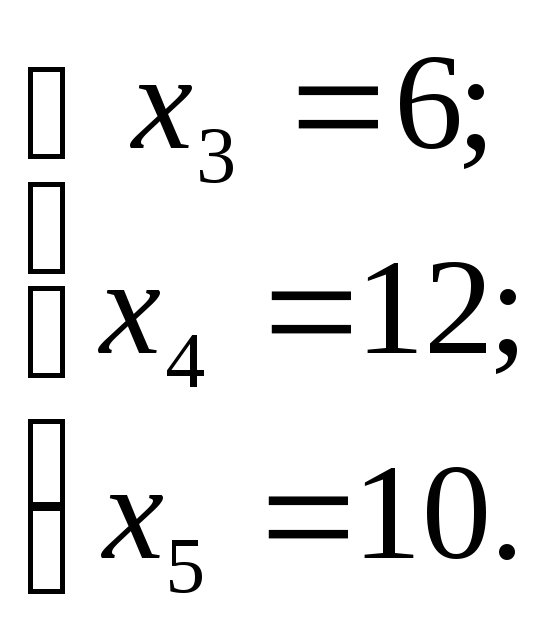
,![]() .
(1.6)
.
(1.6)
Значения (1.6) запишем в виде вектора
![]() .
.
Собирая вместе (1.5) и (1.6), получаем начальный опорный план
![]() .
.
Значение целевой функции для этого плана равно
![]() .
.
Шаг 5. Проверка оптимальности плана.
Для каждого из
векторов
![]() определим величину оценки
определим величину оценки
![]() .
.
Имеет место утверждение: план ЗЛП, сформулированной на нахождение максимального значения целевой функции, является оптимальным, если
![]() для всех
для всех
![]() .
(1.7)
.
(1.7)
Заметим, что для базисных векторов обязательно
![]() .
.
Это свойство удобно применять для проверки правильности произведенных вычислений.
В рассматриваемом примере имеем:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Получаем: условие
оптимальности (1.7) нарушается для векторов
![]() и
и![]() .
.
Шаг 6. Составление симплекс – таблицы.
Все произведенные расчеты заносим в симплекс – таблицу (таблица 1.1):
Таблица 1.1.
|
i |
Базис |
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
1 |
|
0 |
6 |
1 |
1 |
1 |
0 |
0 |
|
2 |
|
0 |
12 |
3 |
1 |
0 |
1 |
0 |
|
3 |
|
0 |
10 |
1 |
2 |
0 |
0 |
0 |
|
4 |
|
|
0 |
2 |
3 |
0 |
0 |
0 |
Порядок заполнения этой таблицы следующий:
- в первые три строки и последние шесть столбцов поставим коэффициенты из системы ограничений канонической формы ЗЛП;
- последние три
вектора {![]() ,
,![]() ,
,![]() }
образуют стандартный базис трехмерного
пространства, - их номера занесем в
столбец «Базис»;
}
образуют стандартный базис трехмерного
пространства, - их номера занесем в
столбец «Базис»;
- в верхней строке
над всеми векторами {![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() }
поставим соответствующие коэффициенты
целевой функции
}
поставим соответствующие коэффициенты
целевой функции
![]() ;
;
- в столбец «![]() »
поставим коэффициенты, соответствующие
базисным векторам;
»
поставим коэффициенты, соответствующие
базисным векторам;
- в четвертой строке
в столбце ![]() поставим значение
целевой функции
поставим значение
целевой функции
![]() для начального опорного плана;
для начального опорного плана;
- в оставшиеся пять
клеток четвертой строки поставим так
называемые оценки
![]() .
.
Шаг 7. Переход к новому базису.
Поскольку план
![]() не оптимален, то для получения нового
опорного плана необходимо построить
новый базис. «Претендентами» на включение
в базис будут векторы, для которых
нарушается условие оптимальности (1.7).
Итак, критериями перехода от одного
базиса к другому, являются оценки:
не оптимален, то для получения нового
опорного плана необходимо построить
новый базис. «Претендентами» на включение
в базис будут векторы, для которых
нарушается условие оптимальности (1.7).
Итак, критериями перехода от одного
базиса к другому, являются оценки:
![]() ,
,
![]() ,
,![]() ,
,
![]() .
.
В примере условия
оптимальности нарушаются для векторов
![]() (
(![]() )
и
)
и![]() (
(![]() ).
Производим требуемые расчеты:
).
Производим требуемые расчеты:
j=1,
![]() ;
;
j=2,
![]() ;
;
![]() .
.
Последняя оценка
показывает, что из базиса исключается
вектор
![]() и на его место включается вектор
и на его место включается вектор![]() .
Получили новый базис:
.
Получили новый базис:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Элемент
![]() ,
стоящий на пересечении строки
,
стоящий на пересечении строки
![]() и столбца
и столбца
![]() называется разрешающим и помещается в
симплекс – таблице в квадратик.
называется разрешающим и помещается в
симплекс – таблице в квадратик.
Шаг 8. Определение координат небазисных векторов и оценок оптимальности.
Итак, вектор
![]() в новом базисе занимает место вектора
в новом базисе занимает место вектора
![]() .
Значит, его новые координаты должны
быть равны (0,0,1) (вектор
.
Значит, его новые координаты должны
быть равны (0,0,1) (вектор
![]() третий в базисе!), а оценка
третий в базисе!), а оценка
![]() должна быть равна
0. Это означает, что второй столбец
симплекс – таблицы из
должна быть равна
0. Это означает, что второй столбец
симплекс – таблицы из
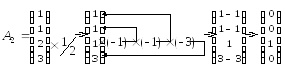
![]() становится
становится
![]() .
.
(в первых трех строчках матрицы – столбца указаны координаты вектора, а во второй – его оценки). Этот переход можно осуществить с помощью элементарных преобразований:
- из 1 – й строки
вычесть 3 – ю строку, умноженную на![]() ;
;
- из 2 – й строки
вычесть 3 – ю строку, умноженную на
![]() ;
;
- из 4 – й строки
вычесть 3 – ю строку, умноженную на
![]() ;
;
- умножить третью
строку на
![]() .
.
А именно
Те же преобразования осуществляем для остальных небазисных векторов:
![]()
Шаг 9. Получение нового опорного плана.
Получим новый
опорный план. Для этого, вектор ![]() из таблицы 1.1 подвергнем тем же
преобразованиям, что и векторы из
предыдущего шага алгоритма:
из таблицы 1.1 подвергнем тем же
преобразованиям, что и векторы из
предыдущего шага алгоритма:
Итак, получен новый опорный план
![]() ,
,
![]() .
.
Шаг 10. Составление симплекс – таблицы.
Все произведенные в шагах 8 и 9 помещаем в симплекс – таблицу (таблица 1.2):
Таблица 1.2.
|
i |
Базис |
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
1 |
|
0 |
1 |
|
0 |
1 |
0 |
|
|
2 |
|
0 |
7 |
|
0 |
0 |
1 |
|
|
3 |
|
-3 |
5 |
|
1 |
0 |
0 |
|
|
4 |
|
|
-15 |
|
0 |
0 |
0 |
|
Шаг 11. Проверка правильности вычислений.
Чтобы убедиться в правильности всех коэффициентов таблицы, можно сделать контроль вычислений по формулам, которые использовались при заполнении 4 – й строки первой симплекс – таблицы:
![]() ;
;
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Так как все эти числа в точности совпадают с числами 4 – й строки симплекс – таблицы, то это означает, что ошибок в вычислениях нет.
Шаг 12. Проверка оптимальности плана.
Просматриваем
последнюю строку симплекс – таблицы.
Видим, что условие оптимальности (1.7)
нарушено. Следовательно, план
![]() не оптимален, условие оптимальности
нарушается для вектора
не оптимален, условие оптимальности
нарушается для вектора
![]() .
.
Далее шаги 7 – 12 повторятся до тех пор, пока не будет выполняться условие оптимальности (1.7), тем самым будет получен оптимальный опорный план.
Шаг 7’.
Так как условие
оптимальности нарушается только для
одного вектора
![]() ,
то именно он включается в базис. Чтобы
определить вектор, исключаемый из
базиса, найдем
,
то именно он включается в базис. Чтобы
определить вектор, исключаемый из
базиса, найдем
 .
.
Значит, разрешающим
элементом является число ![]() ( в клетке
( в клетке
![]()
![]() ).
Вектор
).
Вектор
![]() исключается из базиса и на его место
включается вектор
исключается из базиса и на его место
включается вектор
![]() .
Новый базис:
.
Новый базис:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Шаг 8’.
Из базиса надо убрать вектор
![]() ,
заменив его на
,
заменив его на
![]() .
Для этого из столбца
.
Для этого из столбца
 надо сделать
столбец
надо сделать
столбец
![]()
при помощи следующих элементарных преобразований:
2 стр. – 1 стр.×5, 3 стр.- 1 стр., 4 стр.- 1 стр., 1 стр.×2. (1.8)
Для остальных векторов получаем согласно (1.8)2:
 ,
,
 .
.
Шаг 9’.
Преобразования
(1.8) осуществляем над вектором ![]() 3:
3:
 .
.
Тем самым, получен третий опорный план
![]() ,
,
![]() .
.
Шаг 10’.
В результате получим третью симплекс – таблицу:
Таблица 1.3.
|
i |
Базис |
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
1 |
|
-2 |
2 |
1 |
0 |
2 |
0 |
-1 |
|
2 |
|
0 |
2 |
0 |
0 |
-5 |
1 |
2 |
|
3 |
|
-3 |
4 |
0 |
1 |
-1 |
0 |
1 |
|
4 |
|
|
-16 |
0 |
0 |
-1 |
0 |
-1 |
Шаг 11’.
Контроль вычислений показывает4, что ошибок нет.
Шаг 12’.
Поскольку все
оценки
![]() ,
то этот опорный план является уже
оптимальным планом расширенной задачи.
,
то этот опорный план является уже
оптимальным планом расширенной задачи.
Чтобы перейти к оптимальному плану исходной задачи, необходимо в оптимальном плане расширенной задачи избавиться от фиктивных переменных.
Таким образом, план
![]()
является оптимальным планом исходной задачи и доставляет целевой функции максимальное значение
![]() .
.
Нетрудно заметить,
что начальному опорному плану
![]() соответствует точкаО
на рисунке 1, плану
соответствует точкаО
на рисунке 1, плану
![]() -
точкаА,
а плану
-
точкаА,
а плану
![]() - точкаВ.
Заметим также, что максимальное число
опорных планов в рассмотренной задаче
может быть равным 5-3+1=3.
- точкаВ.
Заметим также, что максимальное число
опорных планов в рассмотренной задаче
может быть равным 5-3+1=3.