

Вернемся к выражению (11) для решения системы (10). Если в этом выражении иизвестны, то можно найтидля всех моментов.
Дискретные линейные системы
Наряду с непрерывными системами будем рассматривать дискретные линейные системы, описываемые разностными уравнениями.
![]() . (12)
. (12)
Индекс
![]() играет роль времени (дискретное время),
а смысл всех остальных векторов и матриц
тот же. Дискретные системы могут возникать
как при дискретной аппроксимации
непрерывных систем, так и в других
случаях. Например,
играет роль времени (дискретное время),
а смысл всех остальных векторов и матриц
тот же. Дискретные системы могут возникать
как при дискретной аппроксимации
непрерывных систем, так и в других
случаях. Например,![]() может означать номер итерации в
итерационном процессе или время в
дискретных процессах, связанных с
цифровым управлением.
может означать номер итерации в
итерационном процессе или время в
дискретных процессах, связанных с
цифровым управлением.
Открытая дискретная система принимает вид:
![]() (13)
(13)
а ее решение также выписывается в явной форме:
![]() . (14)
. (14)
Пример. Модель стационарной линейной системы в пространстве состояний.
Рассмотрим систему дифференциальных первого порядка и алгебраических уравнений
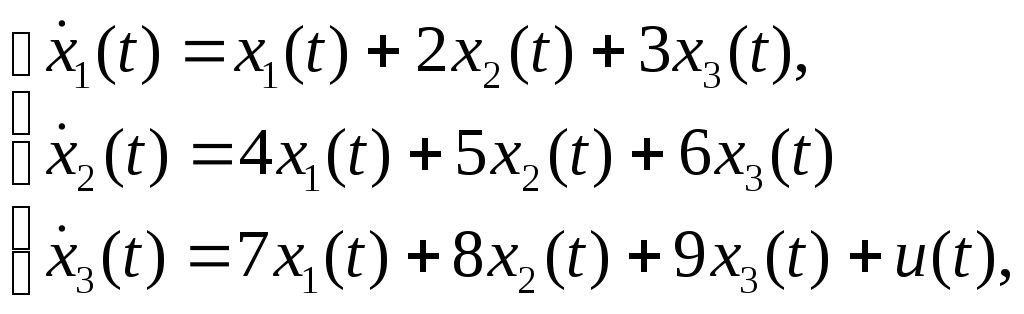
 ,
,
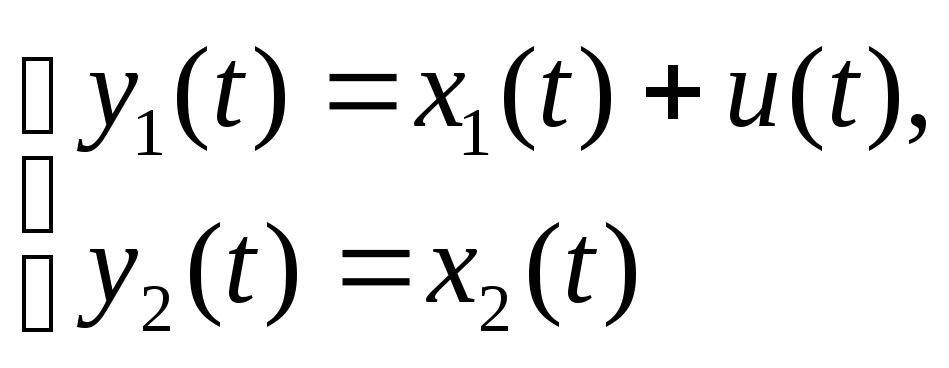
описывающую поведение
некоторого динамического объекта с
одним входом
![]() и двумя выходами
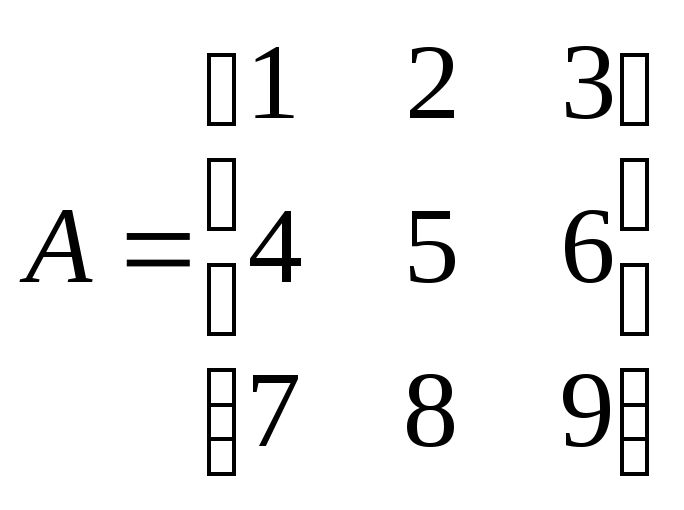
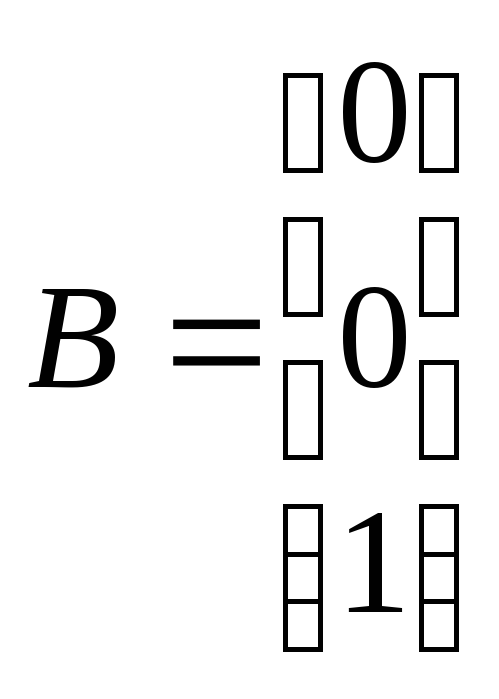
и двумя выходами![]() Вводя соответствующие обозначения и
используя матричную запись, можно
убедиться, что система описывается
четверкой числовых матриц:
Вводя соответствующие обозначения и
используя матричную запись, можно
убедиться, что система описывается
четверкой числовых матриц:
 ,
,
 ,
,
 ,
,
![]() .
.
Передаточные функции (матрицы) в пространстве состояний
Определим передаточные функции в терминах пространства состояний.
Проведем некоторые
формальные преобразования уравнений
в пространстве состояний. Как и в случае
описания систем в терминах «вход-выход»
расмотрим оператор
![]() дифференцирования по времени
дифференцирования по времени
![]() .
.
Будем относиться к
![]() как к комплексной переменной и
рассматривать различные функции от
нее. Таким функциям впоследствии придадим
содержательный смысл. Например, если
как к комплексной переменной и
рассматривать различные функции от
нее. Таким функциям впоследствии придадим
содержательный смысл. Например, если
![]() ,
,
то ![]() .
.
Тогда, подставив
![]() в (10) (при
в (10) (при![]() )
и формально разрешая первое из уравнений
(10) относительно
)
и формально разрешая первое из уравнений
(10) относительно![]() ,
получаем выражение
,
получаем выражение
![]() .
.
Тогда для выхода получаем выражение
![]() .
.
Определение.
Матричная функция комплексной переменной
![]()
![]() (15)
(15)
называется передаточной функцией от управления к выходу, а аналогичная функция
![]() (16)
(16)
называется передаточной
функцией от возмущения
![]() к выходу.
Рассмотрим эти функции подробнее.
к выходу.
Рассмотрим эти функции подробнее.
Утверждение.
Элементами матриц
![]() и
и![]() являются дробно-рациональные функции
от переменной
являются дробно-рациональные функции
от переменной![]() ,
которые имеют общий знаменатель
,
которые имеют общий знаменатель
![]() .
(17)
.
(17)
Справедливость
последнего утверждения следует из
правила
Фробениуса
об обращении матриц. Полином
![]() называетсяхарактеристическим
полиномом системы,
т.к. в дальнейшем будет показано, что от
значения его корней зависят такие важные
свойства системы, как устойчивость и
др.
называетсяхарактеристическим
полиномом системы,
т.к. в дальнейшем будет показано, что от
значения его корней зависят такие важные
свойства системы, как устойчивость и
др.
С учетом (17) выражения
для
![]() и, аналогично,
и, аналогично,![]() можно представить в виде
можно представить в виде
![]() и
и![]() ,
,
где
![]() и
и![]() представляют
собой матрицы, элементы которых являются
полиномами от
представляют
собой матрицы, элементы которых являются
полиномами от![]() .
.
Определение.
Нули
![]() (т.е. значения корней) характеристического
полинома
(т.е. значения корней) характеристического
полинома![]() называютсяполюсами
передаточных функций
называютсяполюсами
передаточных функций
![]() :
:
![]() .
.
Таким образом, полюса
совпадают с собственными
числами матрицы
![]() которые, как известно из соответствующего
определения, являются корнями ее
характеристического полинома.
которые, как известно из соответствующего
определения, являются корнями ее
характеристического полинома.
Т.е. полюса передаточной функции – это множество точек, где она не определена.
Возвратимся к
выражению для выхода системы
![]() .
.
На языке передаточных функций выход системы как функцию от управления и внешних входов можно записать в следующем виде:
![]() (18)
(18)
Строгое обоснование перехода от записи (9) системы в пространстве состояний к форме (18) в терминах передаточных функций может быть сделано с помощью преобразования Лапласа. Опуская это обоснование, будем рассматривать (18) просто как другую форму записи дифференциальных уравнений (9).
Представление системы в форме передаточных функций может быть и исходным. Иногда оно возникает более естественно, чем описание в пространстве состояний. Как в этом случае можно перейти к описанию системы в пространстве состояний?
Рассмотрим для простоты ситуацию, когда наблюдаемые внешние возмущения и ошибки измерения выхода (помехи) отсутствуют:
![]() . (19)
. (19)
В этой записи под
передаточной функцией
![]() будем
понимать матрицу
будем
понимать матрицу![]() ,
элементы которой есть дробно-рациональные
функции от
,
элементы которой есть дробно-рациональные
функции от![]() ,
т.е. функция
,
т.е. функция![]() представима в виде
представима в виде
![]() ,
,
где элементы
![]() матрицы
матрицы![]() являются
полиномами от
являются
полиномами от![]() .
Полином
.
Полином![]() - общий знаменатель элементов матрицы
- общий знаменатель элементов матрицы![]() - будем называть характеристическим
полиномом системы, а его корни – полюсами
передаточной функции (системы). Такое
определение характеристического
полинома и полюсов системы не вполне
точно, поскольку могут возникнуть
неприятности, например, с сокращением
неустойчивых полюсов (это будет
рассмотрено позже).
- будем называть характеристическим
полиномом системы, а его корни – полюсами
передаточной функции (системы). Такое
определение характеристического
полинома и полюсов системы не вполне
точно, поскольку могут возникнуть
неприятности, например, с сокращением
неустойчивых полюсов (это будет
рассмотрено позже).
Более строгое
определение дается следующим образом.
Формально умножив обе части (19) на
![]() ,
получим
,
получим
![]() . (20)
. (20)
Рассматривая теперь
![]() как оператор дифференцирования, приходим
теперь к системе дифференциальных
уравнений высокого порядка относительно
как оператор дифференцирования, приходим
теперь к системе дифференциальных
уравнений высокого порядка относительно![]() .
На элементы
.
На элементы![]() естественно накладывать дополнительное
условие реализуемости: степень полинома
в числителе не превосходит степени
полинома в знаменателе. Такие передаточные
функции называют реализуемыми, или
правильными. Тогда, вводя «искусственные»
переменные – состояния, можно привести
(20) к виду, аналогичному (9).
естественно накладывать дополнительное
условие реализуемости: степень полинома
в числителе не превосходит степени
полинома в знаменателе. Такие передаточные
функции называют реализуемыми, или
правильными. Тогда, вводя «искусственные»
переменные – состояния, можно привести
(20) к виду, аналогичному (9).
Иными словами, от записи системы с помощью реализуемой передаточной функции можно перейти к эквивалентному описанию в пространстве состояний. Такой переход принято называть реализацией передаточной функции в пространстве состояний. При этом используют запись
![]()
или
![]() что означает, что система
что означает, что система![]() эквивалентна
системе
эквивалентна
системе
![]()
и при этом
![]() .
.
Переход от
![]() к
к![]() -реализации
может быть осуществлен разными способами,
и таких реализаций много. Среди них
существуют такие , в которых размерность
матрицы
-реализации
может быть осуществлен разными способами,
и таких реализаций много. Среди них
существуют такие , в которых размерность
матрицы![]() ,
т.е. размерность вектора состояний
,
т.е. размерность вектора состояний![]() минимальна. Их называютминимальными
реализациями.
минимальна. Их называютминимальными
реализациями.
Вообще говоря, для
широкогоряда практических задач запись
систем с помощью передаточных функций
очень удобна. Продемонстрируем это на
простом примере. Пусть имеется несколько
объектов соответствующих размерностей,
соединенных последовательно, так что
выход
![]() каждого служит входом
каждого служит входом![]() следующего, причем каждый объект имеет
свою передаточную функцию
следующего, причем каждый объект имеет
свою передаточную функцию![]() :
:
![]() .
.
Мы для простоты
полагаем, что имеется единственный
входной сигнал
![]() ,
а ошибки измерения (помехи) отсутствуют.
,
а ошибки измерения (помехи) отсутствуют.

Подставляя
последовательно, получаем для связи
общего входа
![]() и выхода
и выхода![]() :
:
![]() ,
,
т.е. передаточная функция последовательного соединения равна произведению передаточных функций объектов:
![]() .
.
На языке пространства состояний описать такое соотношение было бы значительно менее удобно. Поэтому в инженерной практике, где нередко рассматриваются сложные соединения более простых звеньев (так называемые блок-схемы систем), язык передаточных функций бывает порой предпочтительней, чем описание в пространстве состояний или в терминах «вход-выход». Существуют определенные правила, рассчета передаточной функции блок-схемы всей системы по передаточным функциям ее отдельных звеньев (блоков).
Представим еще одно важное свойство, демонстрирующее удобство такого описания систем.
Пусть система имеет вид:
![]()
а входное воздействие
![]() представляет собой комплексныйгармонический
сигнал
представляет собой комплексныйгармонический
сигнал
![]() ,
,
где
![]() - некоторый постоянный вектор,
- некоторый постоянный вектор,![]() - частота колебаний (в теории управления
мнимую единицу принято обозначать
- частота колебаний (в теории управления
мнимую единицу принято обозначать![]() ).
).
Из формулы (11) для
решения системы
![]() получим:
получим:
![]() . (21)
. (21)
Предположим, что
матрица
![]() устойчива (об условиях устойчивости
матриц и систем будет рассмотрено
позднее). Можно показать, что для
устойчивых матриц
устойчива (об условиях устойчивости
матриц и систем будет рассмотрено
позднее). Можно показать, что для
устойчивых матриц![]() при
при![]() .
.
Через![]() обозначимустановившееся
значение вектора состояния:
обозначимустановившееся
значение вектора состояния:
![]() . (22)
. (22)
Тогда можно показать,
что из (21), (22) следует, что
![]() при
при![]() .
.
Таким образом, для установившегося значения выхода имеем:
![]()
![]() при
при
![]() .
.
Или, иначе говоря,
![]() (23)
(23)
где матрица
![]() называетсячастотной
характеристикой
системы.
называетсячастотной
характеристикой
системы.
Поясним смысл
полученного соотношения (23). Пусть все
компоненты входного вектора
![]() равны 0 кроме
равны 0 кроме![]() й,
которую представим в виде:
й,
которую представим в виде:
![]() ,
,
где
![]() -
-![]() й
элемент матрицы
й
элемент матрицы![]() ,
а
,
а![]() .
В силу линейности
.
В силу линейности![]() отклик
системы на сумму вещественной и мнимой
составляющих
отклик
системы на сумму вещественной и мнимой
составляющих![]() равен сумме откликов на каждую из них,
т.е.
равен сумме откликов на каждую из них,
т.е.
если в качестве
входа взять вещественную гармонику
![]() ,
то на
,
то на![]() -м
выходе установившееся значение будет
-м
выходе установившееся значение будет
![]() (24)
(24)
Отчюда вытекает
следующий важный результат: если на
![]() й
вход системы с устойчивой характеристикой
поступает гармонический сигнал с
частотой
й
вход системы с устойчивой характеристикой
поступает гармонический сигнал с
частотой![]() ,
то на
,
то на![]() -м
выходе получается гармонический сигнал
с той же частотой, но амплитуда отличается
в
-м
выходе получается гармонический сигнал
с той же частотой, но амплитуда отличается
в![]() раз. Эту величину называюткоэффициентом
усиления
входного гармонического сигнала, в то
время как фаза изменяется на
раз. Эту величину называюткоэффициентом
усиления
входного гармонического сигнала, в то
время как фаза изменяется на
![]() .
.
Передаточные функции дискретных систем
Введем
теперь определение передаточной функции
для дискретных систем. Определим оператор
сдвига назад
![]() :
:
![]() (25)
(25)
и
аналогично предыдущему случаю будем
рассматривать его как формальную
переменную. Тогда
при
![]() первое из уравнений (12):
первое из уравнений (12):
![]()
запишется в виде:
![]()
т.е.
![]()
![]()
Теперь
передаточные функции выражаются через
переменную
![]() по
формуле:
по
формуле:
![]() , (26)
, (26)
![]() .
.
Аналогично непрерывному случаю, будем называть характеристическим полиномом дискретной линейной системы общий знаменатель элементов матричных функций:
![]() от
переменной
от
переменной
![]() .
.
Соответственно, как и в непрерывном случае, передаточные функции имеют вид:
![]() ,
,
![]() ,
,
где
![]() и
и
![]() - матрицы, элементы которой являются
полиномами от
- матрицы, элементы которой являются
полиномами от
![]() .
.
Поэтому
если
![]() не имеет нулей внутри единичного круга
(т.е. матрица А дискретно устойчива, т.е.
не имеет нулей внутри единичного круга
(т.е. матрица А дискретно устойчива, т.е.
![]() для всех собственных значений А), то
матричные функции
для всех собственных значений А), то
матричные функции
![]() и
и
![]() аналитичны
в этом круге.
аналитичны
в этом круге.
Аналогично
тому, как это сделано для непрерывных
систем, можно показать, что если у
открытой системы (13):
![]() без ошибок наблюдения выхода (
без ошибок наблюдения выхода (![]() )
матрица А дискретно устойчива, а на вход
подается гармонический сигнал
)
матрица А дискретно устойчива, а на вход
подается гармонический сигнал
![]() ,
,
то выход системы стремится к установившемуся значению, записываемому формулой:
![]() ,
,
т.е.
и в этом случае гармонические сигналы
преобразуются в пределе в гармонические
с амплитудой, измененной в
![]() раз
и со сдвигом по фазе, равным
раз
и со сдвигом по фазе, равным
![]() .
Знак
минус соответствует оператору сдвига
назад.
.
Знак
минус соответствует оператору сдвига
назад.
Видно, что и в дискретном случае язык передаточных функций хорошо приспособлен к описанию прохождения гармонических сигналов, имеющих фиксированную частоту.
Методы анализа систем, основанные на таком подходе, называют частотными.
Операторный подход к описанию линейных систем в пространстве состояний
Рассмотрим непрерывную стационарную систему:
![]()
![]() (27)
(27)
при
нулевых начальных условиях и отсутствии
ошибок на выходе (![]() ).
).
Тогда сигнал на выходе линейно зависит от сигнала на входе:
![]() ,
,
где
![]() - некоторый линейный оператор.
- некоторый линейный оператор.
Для линейной системы (27) этот оператор является линейным интегральным оператором и имеет явное выражение:
![]() .
.
Функция
![]() называется весовой
функцией
системы.
называется весовой
функцией
системы.
Однако можно рассматривать и более общие линейные операторы L, задающие соответствие входа и выхода. При этом система не обязательно приводима к виду (27).
На
такие операторы следует наложить
естественные ограничения, например,
требование причинности: значение выхода
![]() в момент
в момент
![]() не может зависеть от значений входа
не может зависеть от значений входа
![]() в будущем
в будущем
![]() .
.
Кроме того, оператор L должен быть ограниченным в смысле определенной операторной нормы.
Для
одномерного
случая (когда входной и выходной сигналы
скалярные), весовая
функция определяется
как реакция системы в момент
![]() на
на
![]() -
функцию:
-
функцию:
![]()
(функция, имеющая конечное значение при единственном значении переменной (обычно в начале координат) и равная нулю при всех других значениях.), если начальное состояние было нулевое.
Эту функцию называют также импульсной характеристикой системы.
Для одномерных систем в качестве другого «типового» сигнала на входе рассматривают также «единичный скачок», или функцию Хевисайда:
1![]() .
.
Реакцию
системы (при нулевых начальных условиях)
на такое входное воздействие называют
переходной характеристикой
![]() ,
или переходной функцией. Она связана с
импульсной характеристикой соотношением:
,
или переходной функцией. Она связана с
импульсной характеристикой соотношением:
![]() .
.
Способ описания систем с помощью весовой или переходной функций часто применяется при моделировании сложных физических устройств неизвестной структуры.
Управляемые системы. Критерии управляемости