

Конспект лекц ТАУ _1ч _11 л
.pdf11
висящее от значения hп* . Таким образом, данная система работает по отклоне-
нию.
Если увеличить скорость вытекающей воды qвых , увеличив диаметр трубки, то увеличится значение установившейся ошибки hп уст .
Определение. Если установившаяся ошибка по отношению к выбран-
ному входному воздействию не равна нулю, то такая система называется статической, а если равна нулю – астатической по отношению к данному воздействию.
Позднее будет показано, что астатизм системы зависит также от вида входного воздействия и количества интегрирующих элементов в контуре глав-
ной обратной связи.
Таким образом, система на рис. 3 является статической. Однако если ис-
ключить вытекание воды из резервуара, полагая qвых 0 , то получим
hп уст 0 , и система станет астатической. Ее астатизм определяется наличием накапливающей емкости, т.е. процессом интегрирования поступающей воды.
Если в резервуаре имеются утечки воды qу , то на рис. 3 следует поло-
жить q qвх qвых qу , где qу является возмущением и очевидно увеличивает
ошибку hпуст.
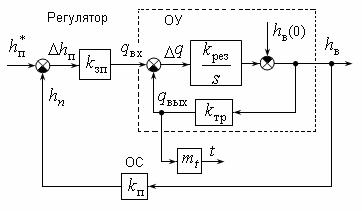
В функциональной схеме рис. 3 присутствуют все основные элементы
замкнутой САУ: ОУ – резервуар с втекающей и вытекающей водой; главная ОС – поплавок, являющийся одновременно чувствительным элементом (изме-
рительным устройством), регулирующим органом и регулятором; устройство сравнения (УС) – формирователь ошибки hп hп* hп . Системы, в которых чувствительный элемент непосредственно воздействует на регулирующий ор-
ган, называются системами прямого регулирования. Системы, в которых между чувствительным элементом и исполнительным органом имеются усилительно-
преобразовательные устройства, называются системами непрямого регулирова-
12
ния.
Следует отметить, что если в качестве ОУ принять отдельно резервуар как емкость, на вход которого поступает вода, то трубку для отвода воды мож-
но считать местной обратной связью, а сама система называется двухконтур-
ной (вложенные контуры).
Если из системы удалить поплавок (главную ОС), то она станет разомк-
нутой, у которой качество работы будет ниже из-за изменяющейся скорости
qвх поступления воды.
От функциональной схемы рис. 3 можно перейти к структурной схеме,
представляющей собой структурное математическое описание системы или ее
модель.
Если |
функциональные элементы системы представить линейными зави- |
симостями |
с соответствующими коэффициентами передачи (например, |
qвх kзп hп ), а также ввести символ дифференцирования s d / dt и символ ин- |
|
тегрирования, как обратную операцию дифференцирования, обозначенный че- |
|
рез 1/ s , то с учетом уравнения
t |
|
kрез |
|
|
hв(t) hв(0) kрез q( )d hв |
(0) |
q |
||
|
||||
0 |
|
s |
||
|
|
|
||
структурная схема будет иметь вид рис. 4. |
|
|
|
|
Рис. 4
13
Емкостные свойства проявляются в различных физических процессах: 1. В механике прямолинейное движение материальной точки с постоян-
ной массой m под действием силы F по оси x согласно второму закону Нью-
тона записывается уравнением
|
|
mv F , |
x v , |
|
(1) |
|
из которого с учетом начальных условий x(0), v(0) |
следует, что |
|
||||
|
1 |
t |
|
t |
|
|
v(t) v(0) |
F( )d , |
x(t) x(0) v( )d , |
(2) |
|||
m |
||||||
|
0 |
|
0 |
|
||
|
|
|
|
|||
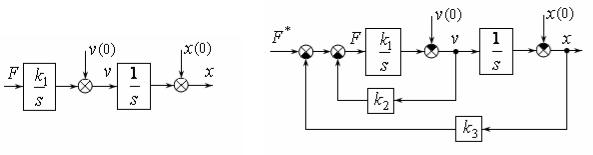
и чем больше масса тела m , тем медленнее изменяется скорость v(t) . Следова-
тельно, масса тела m определяет емкостные свойства механического движения.
Уравнения (1) с учетом выражений (2) можно представить в виде структурной
схемы, представленной на рис. 5, где k1 1/ m, начальные условия v(0) , |
x(0) – |
|
дополнительные входы. Если сила F F* k |
v k x , то из уравнений (1) сле- |
|
2 |
3 |
|
дует уравнение |
|
|
mx k2x k3x F* , |
(3) |
|
которому соответствует двухконтурная структурная схема рис. 6, где F* |
явля- |
|
ется входом, x – выходом системы. |
|
|
Рис. 5 |
Рис. 6 |
Аналогичные результаты можно получить для вращения твердого тела вокруг неподвижной оси с угловой скоростью и моментом инерции J отно-
сительно оси вращения под действием момента M с помощью уравнений
J M , . |
(4) |
14
2. В электротехнике емкостные свойства электрических процессов опре-
деляются двухполюсниками: индуктивностью L и емкостью C , – с помощью уравнений связи напряжения u на зажимах двухполюсника и протекающего по нему тока i :
|
1 |
t |
|
1 |
t |
|
|
i i(0) |
u( )d , |
u u(0) |
i( )d . |
(5) |
|||
L |
C |
||||||
|
0 |
|
0 |
|
|||
|
|
|
|
|
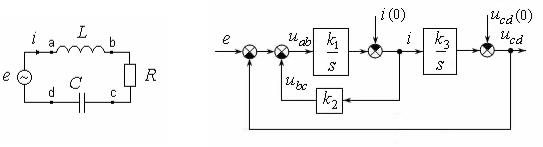
Например, для электрического контура рис. 7, в котором индуктивность L ,
омическое сопротивление R , конденсатор C и внешний источник энергии э.д.с. e соединены последовательно, с учетом второго закона Кирхгофа справедливы уравнения в символьном виде:
u |
|
e u |
u |
, i i(0) |
1 |
u |
|
, |
u |
u |
(0) |
1 |
i , |
u Ri , |
|
|
|
|
|||||||||||
|
ab |
bc |
cd |
|
Ls |
ab |
|
cd |
cd |
|
Cs |
bc |
||
по которым построена структурная схема рис. 8 для входа e |
и выхода ucd с |
|||||||||||||
учетом обозначений k1 1/ L , k2 R , k3 |
1/C . |
|
|
|
|
|
||||||||
Рис. 7 Рис. 8
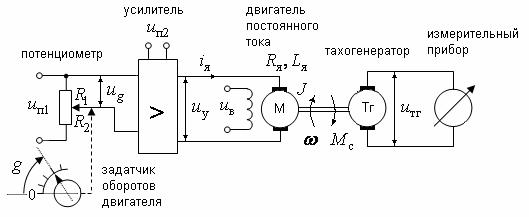
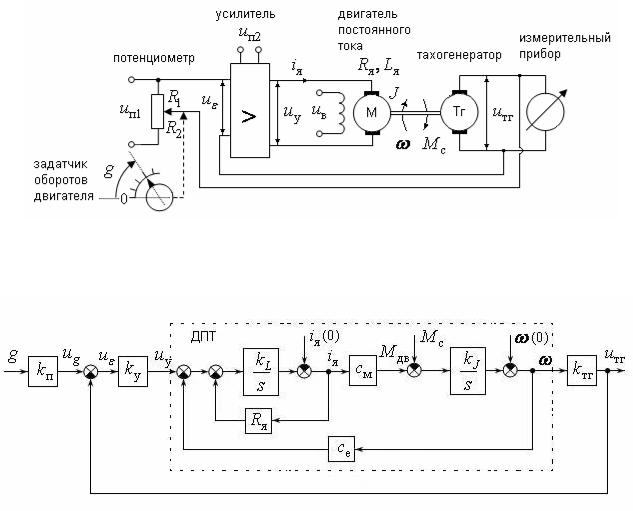
3. Примером электромеханической системы управления может служить система регулирования скорости двигателя постоянного тока, принципиальная схема которой приведена на рис. 9. Здесь с помощью управляющего воздейст-
вия g задаются требуемые обороты двигателя, которые контролируются с по-
мощью тахогенератора вырабатывающего напряжение, пропорциональное обо-
ротам двигателя uтг kтг , и наблюдаются на измерительном приборе.
Здесь с помощью управляющего воздействия g задатчика оборотов дви-
гателя перемещается движок потенциометра, на вход которого подается напря-
жение питания uп1, а с выхода снимается сигнал ug uп1R1 / R , где R R1 R2 .
15
Рис. 9
Полагая R1 k1g можно считать, что ug kпg , где kп uп1k1 / R . Сигнал ug по-
дается на вход усилителя мощности с источником питания uп2 и коэффициен-
том усиления ky , с выхода которого напряжение uy kyug подается в якорную
цепь двигателя постоянного тока (ДПТ) с омическим сопротивлением Rя и ин-
дуктивностью Lя. На независимую обмотку возбуждения двигателя (статорную обмотку) подается постоянное напряжение uв . Если не учитывать насыщение,
то магнитный поток в воздушном зазоре между статором и ротором пропор-
ционален току возбуждения iв , т.е. kвiв . Учитывая, что электромагнитный
момент двигателя Mдв cдв iя , где iя – ток в цепи якоря, cдв |
– конструктивный |
коэффициент двигателя, то получим |
|
Mдв cдвkвiвiя cмiя , |
(6) |
где cм – постоянный коэффициент вращающего момента ротора двигателя,
значение которого зависит от тока возбуждения iв . Ток в цепи якоря iя связан с напряжением uy уравнением:
u |
|
R i |
L |
diя |
c , |
(7) |
|
|
|
||||||
|
у |
я я |
я |
dt |
е |
|
|
где – угловая скорость ротора двигателя, |
cе – коэффициент противо-ЭДС |
||||||
якоря, который в системе единиц СИ равен cм . Тем самым для тока якоря iя с
учетом обозначения kL 1/ Lя справедливо уравнение в символьном виде:
|
|
|
|
|
|
|
|
|
|
16 |
i |
i |
(0) |
kL |
(u |
у |
R i |
c ) . |
(8) |
||
|
|
|||||||||
я |
я |
|
|
|
s |
я я |
е |
|
||
|
|
|
|
|
|
|
|
|
||
Угловая скорость ротора двигателя зависит от электромагнитного мо- |
||||||||||
мента двигателя Mдв посредством уравнения динамики |
|
|||||||||
|
|
J |
d |
Mдв Mc , |
(9) |
|||||
|
|
|
||||||||
|
|
|
dt |
|
|
|
|
|||
где J – приведенный момент инерции ротора двигателя с учетом инерции на-
грузки, Mc – момент сопротивления на валу двигателя. Тем самым для угловой скорости с учетом обозначения kJ 1/ J справедливо уравнение в символьном виде:
(0) |
kJ |
(M |
дв Mc ) . |
(10) |
|
||||
|
s |
|
|
|
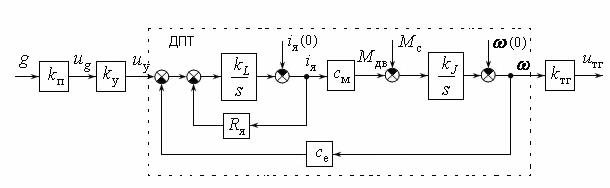
Уравнениям (6), (8), (10) соответствует структурная схема системы, пред-
ставленная на рис. 10, из которой следует, что ДПТ является двухконтурной системой, при этом система по каналу вход-выход разомкнутая.
Рис. 10
Недостатком разомкнутой системы является существенная зависимость угловой скорости от момента сопротивления Mc . Здесь при росте Mc сни-
жается : Mc , поэтому для поддержания заданной скорости * необ-
ходимо участие человека, изменяющего значение g .
Для повышения точности подержания заданной скорости * при некото-
ром значении Mc* без участия человека используется обратная связь по скоро-
17
сти, как показано на рис. 11. Структурная схема системы представлена на рис. 12. В этом случае на вход усилителя подается разность u ug uтг . Поэтому здесь происходят следующие изменения: Mc uтг u uу .
Спустя некоторое время система перейдет в установившийся режим со значе-
ниями u |
y уст |
, |
i |
, |
уст |
* при M |
c |
M * . Здесь значение ошибки |
* |
уст |
|
|
я уст |
|
|
c |
|
||||
тем меньше, |
чем больше значение коэффициента усиления ky , что следует из |
|||||||||
выражения uy уст kyu уст.
Для функционирования системы необходимо, чтобы u 0, т.е. система работает по отклонению и является статической по отношению к команде g и
возмущению Mc .
Рис. 11
Рис. 12

18
3. В теплотехнике во многих случаях поток тепла Q (Вт) через объект с тепловым сопротивлением R (К/Вт) пропорционален разности температур на его границах T1 и T2 (К):
|
Q |
T1 T2 |
, |
(11) |
|
|
|||
|
|
R |
|
|
где R l /(kP), |
l длина пути (м) теплового потока, |
проходящего через по- |
||
верхность площадью P (м2 ), k – теплопроводность материала (Вт/(Км)).
Емкостные свойства тепловых процессов определяются аккумулирующей способностью тела накапливать тепловую энергию, температура которого оп-
ределяется по формуле:
|
1 |
t |
|
|
T T (0) |
Q( )d , |
(12) |
||
C |
||||
|
0 |
|
||
|
|
|
||
где Q – алгебраическая сумма входящих и исходящих тепловых потоков, |
C – |
|||
теплоемкость тела (Дж/К), зависящая от массы тела и свойства материала.
Например, тепловой баланс однородной жидкости с температурой T и
теплоемкостью С в баке (рис. 13) при температуре T0 окружающей среды, при тепловых потоках Q1 (T T0 )/ R1 (через верхнюю и нижнюю стенки с суммар-
ным тепловым сопротивлением R1) и Q2 (T T0 )/ R2 (через боковые стенки с суммарным тепловым сопротивлением R2 ), Qн (от нагревателя) записывается
уравнением (12), где
Q Q |
Q |
Q |
Q |
|
|
1 |
|
1 |
|
(T T ) . |
(13) |
|
|
R |
|
||||||||
н |
1 |
2 |
н |
|
R |
0 |
|
||||
|
|
|
|
|
|
1 |
|
2 |
|
|
|
Рис. 13 |
Рис. 14 |
19
Уравнениям (12), (13) соответствует одноконтурная структурная схема системы на рис. 14 с входом Qн, выходом T и возмущением T0 , где k1 1/C , k2 1/ R1 1/ R2 .
Таким образом, при наличии емкостных свойств у элементов системы различной физической природы и конечной скорости протекания процессов система является динамической.
Сравнивая, например, структурные схемы рис. 6 и рис. 8 можно устано-
вить аналогию протекающих в системе процессов, который описываются по-
добными дифференциальными уравнениями. Более того, с помощью электри-
ческой схемы рис. 7 можно проводить моделирование механической системы.
Иначе говоря, решение дифференциальных уравнений, описывающих динами-
ческие процессы любой природы можно осуществлять путем построения элек-
трических моделей в аналоговых вычислительных машинах [9].
Другой способ моделирования динамических систем связан с использо-
ванием, например, вычислительного пакета MATLAB и системы моделирова-
ния Simulink [14], в которой используются структурные схемы аналогичные рассмотренным выше.
Вопросы для самопроверки
1.Что является объектом управления?
2.Какую функцию выполняет регулятор в САУ?
3.Чем отличие САУ от АСУ?
4.В чем заключается принцип обратной связи?
5.С помощью каких блоков моделируется динамическая система?
6.Чем отличается статическая система от астатической?
7.От чего зависит статическая ошибка в замкнутой системе стабилизации скорости ДПТ?
8.В чем проявляется общность динамических процессов различной физиче-
ской природы?
20
ЛЕКЦИЯ 2
Классификация САУ. Математические модели функциональных элементов. Преобра-
зование Лапласа.
1. Классификация САУ
В рассмотренных выше простейших системах функциональные элементы
приняты линейными. Такие системы называются линейными. Если ФЭ пред-
ставляются в виде нелинейных функций от одного или нескольких входных сигналов, то такие системы называются нелинейными. Примером нелинейной
системы может |
быть система, представленная уравнением (1.1), где |
F F* f (x,v), |
f (x,v) – нелинейная функция. |
Если ФЭ не зависят от времени t , то система называется стационарной, в
противном случае – нестационарной. Учитывая, что время t является выход-
ной координатой вспомогательного ФЭ, представленного уравнением dt / d mt , то нестационарную систему можно считать разновидностью нели-
нейной системы. С физической точки зрения все ФЭ являются стационарными и введение нестационарных ФЭ вызвано удобством математического описания или следствием математических преобразований. Например, если на катушку наматывается видеопленка, то в некоторых случаях удобнее полагать момент инерции катушки зависящим от времени t , чем рассматривать сам процесс пе-
ремотки пленки.
Если на выходе ФЭ сигнал изменяется дискретно по времени и/или уров-
ню (например, при использовании в контуре управления ЦВМ), то система с такими ФЭ называется дискретной, в противном случае непрерывной.
Если возмущения, действующие на систему, являются случайными функ-
циями времени, то система называется стохастической, в противном случае
детерминированной.
Если некоторые ФЭ системы описываются дифференциальными уравне-
ниями в частных производных (упругая конструкция ЛА, линии электропере-
дач, нагреваемые массы, длинные трубопроводы и др.), то система называется