

Конспект лекц ТАУ _1ч _11 л
.pdf131
числе, входными сигналами, которое с течением времени для устойчивой сис-
темы затухает, т.е. стремится к нулю. Установившееся движение зависит толь-
ко от вида входного воздействия. Оценка качества процессов или движения САР проводится для переходного и установившегося движения.
Показатели качества регулирования делятся на прямые и косвенные пока-
затели качества.
2. Прямые показатели качества.
В инженерной практике наибольшее распространение получили показа-
тели качества для переходной характеристики выхода системы – реакции выхо-
да системы y(t) на ступенчатое входное воздействие g(t) g01(t), g0 const
при отсутствии возмущения и нулевых начальных условиях (рис. 2).
Здесь определяются следующие прямые показатели качества:
для установившегося движения
1 установившаяся ошибка уст g0 yос уст ;
для переходного движения
2 время регулирования tp – минимальное время, по истечении которого
132
выходная координата y(t) входит в трубку величиной 2 yуст и не покидает
ее, т.е. выполняется условие | y(t) yуст | yуст для t tp (обычно 0,05);
3 перерегулирование , которое определятся по формуле
|
ymax yуст |
100%. |
(1) |
|
yуст
4)время нарастания tн – минимальное время, при котором y(tн) yуст .
5)число колебаний y(t) на интервале времени 0 t tp .
Наилучшим считается процесс с наименьшими значениями указанных по-
казателей качества или принадлежащий заданной закрашенной области рис.2.
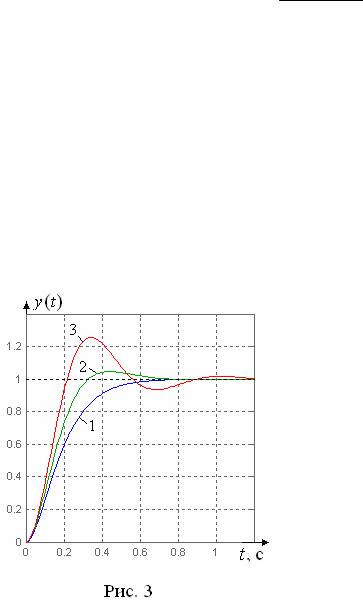
Переходные движения, вызванные ступенчатыми входными воздейст-
виями, принято делить на три группы (рис. 3): 1-монотонные, 2-апериодические и 3-колебательные.
У монотонных процессов первая производная y(t) не меняет знак, у апериодических знак производной меняется не более одного раза, а
у колебательных производная y(t) меняет знак периодически.
Установившаяся ошибка устойчивой системы может быть найдена по теореме о конечном значении оригинала
|
уст lim (t) lim pE( p), |
(2) |
|||
|
|
|
t |
p 0 |
|
если известно, что существует предел уст |
lim (t) const . Здесь изображение |
||||
|
|
|
t |
|
|
ошибки по Лапласу E( p) для системы рис. 1 определяется по формуле |
|
||||
1 |
|
|
|
|
|
E( p) |
|
|
G( p) , |
|
|
|
|
|
|
||
1 W ( p)
где W ( p) W1( p)W2( p)Wос( p) – передаточная функция разомкнутой системы.
а) Для входного сигнала g(t) g01(t), соответственно G( p) g0 / p . Тогда
133
получим изображение ошибки
|
E( p) |
1 |
|
|
|
g0 |
. |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1 W ( p) p |
|
|
||||||
Полагая W (0) bm / an k 0 , где k |
– коэффициент усиления разомкну- |
|||||||||
той системы, найдем |
|
|
|
|
|
|
|
|
|
|
уст |
lim p ( p) |
|
g0 |
|
ст . |
(3) |
||||
|
|
|||||||||
|
p 0 |
|
1 k |
|
|
|||||
Значение ошибки ст называется статической ошибкой. |
Система, у которой |
|||||||||
статическая ошибка не равна нулю, называется статической по отношению к заданному входному воздействию. Система, у которой статистическая ошибка равна нулю, называются астатической.
Таким образом, установившаяся ошибка согласно выражению (3) зависит от коэффициента передачи разомкнутой системы k , т.е. чем больше его значе-
ние, тем меньше установившаяся ошибка.
Астатизм системы обусловлен наличием в разомкнутой системе интегри-
рующих звеньев, т.е. ее передаточная функция может быть представлена в ви-
де:
|
|
W |
( p) |
m( p) |
, |
|
|
|
|
|||
|
|
|
|
|
|
|||||||
|
|
раз |
|
pvdv ( p) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
где v 1,2,... – порядок астатизма, полином dv ( p) |
не имеет нулевых корней. |
|||||||||||
Действительно, в этом случае при постоянном входном воздействии по- |
||||||||||||
лучим |
|
|
|
|
|
|
|
|
|
|
|
|
|
уст |
lim p |
|
pvd |
v |
( p) |
|
g |
0 |
0 . |
||
|
pvdv ( p) m( p) |
|
|
|||||||||
|
p 0 |
p |
||||||||||
б) Если входное воздействие является линейно нарастающей функцией времени g(t) g1t , соответственно G( p) g1 / p2 , и степень астатизма v 1
астатизм первого порядка), то
|
уст |
lim p |
pd1( p) |
|
g1 |
|
g1 |
|
ск |
, |
(5) |
pd1( p) m( p) p2 |
|
||||||||||
|
p 0 |
|
k |
|
|
||||||
134
где k m(0)/ d1(0) 0, ск – называется скоростной ошибкой.
Для системы с астатизмом второго порядка (v 2 ) в этом случае устано-
вившаяся ошибка, очевидно, равна нулю.
При наличии возмущения f (t) установившаяся ошибка определяется аналогично и равна сумме установившихся ошибок от входа g(t) и возмущения f (t) , найденных отдельно.
2. Косвенные показатели качества.
При расчетах САР прямые показатели качества оцениваются с помощью косвенных показателей, которые делятся на алгебраические, частотные и инте-
гральные показатели.
1. Алгебраические показатели качества позволяют судить о качестве переходного процесса по коэффициентам или корням характеристического уравнения.
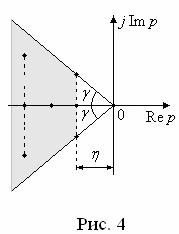
Рассмотрим корневые показатели качества, связанные с распределением левых корней на комплексной плоскости (рис. 4). Здесь используют степень устойчивости и колебательности.
а) Степенью устойчивости называется расстояние от мнимой оси до ближайшего левого корня.
Степень устойчивости характеризует быстродействие системы.
Это связано с тем, что быстрота затухания переходного процесса в значительной мере определяется вещественной частью корня, наиболее близко располо-
женного к мнимой оси. При этом справедлива оценка для времени регулирования tp 3 5/ .
Если ближайшим к мнимой оси является вещественный корень, то ему соответствует апериодическая составляющая переходного процесса e tc1 (апе-
риодическая степень устойчивости).
Пример 1. Рассмотрим систему первого порядка

135
y(t) ay(t) k 1(t) ,
для которой найдем решение y(t) . Изображение выхода в преобразованиях Ла-
пласа при нулевом начальном условии y(0) 0 имеет вид
Y ( p) |
k |
|
k |
|
1 |
|
1 |
|
, |
|
|
|
|||||||||
( p a) p |
|
|
|
|||||||
|
|
a p |
p a |
|
||||||
которому соответствует оригинал |
|
||
y(t) |
k |
1(t) e at . |
|
a |
|||
|
|
||
Реакция выхода системы y(t) при a k 10 представлена на рис. 5, из которого следует, что время регулирования определяется из уравнения
y(tp) |
1 |
1 e atp 0,95yуст 0,95 |
1 |
. |
|||
|
|
||||||
|
|
a |
|
|
a |
||
Отсюда |
найдем |
e atp 0,05 |
|
или |
|||
tp ln0,05/ a 3/ a . Поскольку a , |
то для |
||||||
системы |
первого |
порядка |
справедлива |
|
оценка |
||
tp 3/ . |
Здесь на рис. 5 |
время регулирования |
|||||
tp 0,3с.
Если же ближайшей к мнимой оси окажется пара комплексно-сопряженных корней p1,2 j , то доминирующая составляющая
переходного процесса e t (Asin t Bcos t) является колебательной (колеба-
тельная степень устойчивости).
Для определения степени устойчивости по характеристическому уравне-
нию системы d( p) 0 проведем замену p p . Тогда получим характери-
стическое уравнение d( p, ) 0, коэффициенты которого зависят от неизвест-
ного параметра . С помощью критерия Гурвица можно найти область устой-
чивости по параметру 0 , верхняя граница которого определяет значение степени устойчивости системы, поскольку при корнях уравнения d( p, ) 0,

136
расположенных на мнимой оси, корни уравнения d( p) 0 имеют степень ус-
тойчивости .
в) При наличии комплексно-сопряженных корней используется степень колебательности, которая характеризует быстроту затухания колебаний за ка-
ждый период и определяется величиной tg , где – наименьший угол сектора,
которому принадлежат левые корни на комплексной плоскости (рис. 4).
Действительно, для пары комплексно-сопряженных корней p1,2 j ,
0, 0 , которым соответствует равенство tg / , составляющую ре-
шения можно представить в виде e t (Asin t Bcos t) с периодом колебаний
Tк 2 / . Тогда через один период амплитуда e t уменьшится до величины
e (t 2 / ) e te 2 / , т.е. чем больше величина / , тем слабее будет за-
тухание колебаний для данной составляющей переходного процесса.
Отметим, что комплексно-сопряженным корням p1,2 j соответ-
ствует полином T 2 p2 2T p 1 при 0 1, для которого справедливы равен-
ства /T , 
 1 2 /T . Тогда получим /
1 2 /T . Тогда получим / 
 1/ 2 1, т.е. степень ко-
1/ 2 1, т.е. степень ко-
лебательности зависит от коэффициента демпфирования .
2. Частотные показатели качества позволяют судить о качестве пере-
ходного процесса по частотным характеристикам замкнутой и разомкнутой системы. Основанием для этого служит связь весовой характеристики системы с ее частотной характеристикой, построенной по передаточной функции или
экспериментально.
Действительно, если известна передаточная функция системы (замкнутой или разомкнутой) W ( p) , то согласно обратному преобразованию Лапласа весо-
вую функцию можно найти по формуле
|
1 |
j |
|
|
w(t) |
W ( p)e ptdp , |
(6) |
||
2 j |
||||
|
j |
|
||
|
|
|
где путь интегрирования в комплексной плоскости p выбирается правее полю-
137
сов изображения W ( p) , при которых оно обращается в бесконечность. Для ус-
тойчивых систем полюса передаточной функции W ( p) лежат в левой полу-
плоскости, поэтому в формуле (6) можно положить 0 и p j . Учитывая,
что при замене переменной p j изменяются пределы интегрирования
p j j j в формуле (6), получим формулу обратного преобразования Фу-
рье:
|
1 |
|
|
|
w(t) |
W ( j )e j td , |
(7) |
||
2 |
||||
|
|
|
||
|
|
|
||
|
|
|
|
где АФЧХ W ( j ) называется изображение Фурье весовой функции w(t) для значений t 0. При этом w( t) 0 , т.е. справедливо выражение
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
W ( j )e j td . |
|
(8) |
|||
|
|
|
|
|
2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Суммируя выражения (7) и (8) получим |
|
|
|
|
||||||||
|
1 |
|
|
|
|
|
1 |
|
|
|
||
w(t) |
|
|
W ( j ) e j t |
e j t d |
|
W ( j )cos t d |
||||||
2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
0 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
W ( j )cos t d W ( j )cos t d |
|
|
||||||
|
|
|
||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
. |
||||
|
1 |
|
0 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
W ( j )cos t d W ( j )cos t d |
|
||||||||
|
|
|||||||||||
|
|
|
|
|
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||
1 W ( j ) W ( j ) cos t d .
0
Сучетом равенства W ( j ) P( ) jQ( ) найдем
2
w(t) P( )cos t d . (9)
0
Для определения переходной функции проинтегрируем выражение (9) по времени:

|
|
|
|
|
|
|
|
|
138 |
|
t |
|
2 |
|
t |
2 |
|
sin t |
|
|
|
h(t) w( )d |
P( ) cos t dt d |
P( ) |
d . |
(10) |
||||||
|
|
|
||||||||
0 |
|
|
0 |
0 |
|
0 |
|
|
||
Тем самым, |
зная вещественную частотную характеристику P( ), можно |
|||||||||
построить переходную характеристику h(t) одним из способов приближенного вычисления интеграла (10), приведенного в [1]. При этом характер переходного процесса зависит от вида частотной характеристики P( ).
а) Для замкнутой системы с передаточной функцией
WЗ( p) W ( p) 1 W ( p)
где W ( p) – передаточная функция разомкнутой системы строится амплитудно-
частотная характеристика AЗ( ) |WЗ( j ) | (рис. 6). Здесь p – резонансная частота, при которой AЗ( ) достигает максимального значения AЗmax ; п –
частота, при которой AЗ( п) 0,707AЗ(0) , оп-
ределяет полосу пропускания системы (0, п) .
Полоса пропускания не должна быть слишком широкой, иначе система будет воспроизводить высокочастотные помехи. Частота среза ср ,
при которой AЗ( ср) 1, косвенно характеризу-
ет время регулирования tp (1 2) 2 / ср, т.е.
чем больше частота среза ср , тем меньше длительность переходного процесса.
Физически это связано с тем, что чем более высокие частоты пропускает систе-
ма, тем менее она инерционна в своих реакциях на входные воздействия.
Другой оценкой качества переходного процесса является показатель ко-
лебательности M AЗmax / AЗ(0) , величина которого характеризует склонность системы к колебаниям. Чем выше значение M , тем менее качественна система при прочих равных условиях.
При проектировании линейных САР принято задаваться значениями
M 1,1 1,7 . При этом значениям M 1,1 1,3 соответствует очень хорошее

139
демпфирование, значениям M 1,3 1,5 – хорошее демпфирование, значениям
M 1,5 1,7 – удовлетворительное демпфирование переходного процесса.
Обеспечение малых значений показатель колебательности 1 M 1,1 тре-
бует применения более сложных и дорогостоящих корректирующих средств и ведет к неоправданному усложнению системы.
Для астатической САР AЗ(0) 1, для статической САР
|
A (0) |
W (0) |
|
|
|
||
|
З |
1 W (0) |
|
|
|
||
и при W (0) 1 значение |
AЗ(0) 1. Поэтому в дальнейшем будем полагать |
||
M AЗmax . Физически это означает, что в установившемся режиме выход сис-
темы равен входному постоянному сигналу.
По известной АФЧХ разомкнутой системы W ( j ) U ( ) jV ( ) можно
найти значение M с помощью выражения |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
M |
|W ( j ) | |
U 2( ) V |
2( ) |
||||||
|
|
|
|
|
|
|
. |
||
|
|
|
|
|
|
||||
|
|1 W ( j ) | |
1 U ( ) 2 V 2 ( ) |
|||||||
Отсюда получим
U 2 ( ) V 2( ) 1 U ( ) 2 V 2 ( ) M 2
или |
U ( ) C 2 V 2 ( ) R2 , |
|
|
(6) |
|
где C M 2 /(M 2 1) , |
R M /(M 2 1) . |
|
Задавая различные значения M по формуле (6) можно построить семей-
ство окружностей со смещенным центром C и ра-
диусом R на комплексной плоскости (рис. 7). Здесь угол является запасом устойчивости по фазе для той системы, у которой АФЧХ W ( j ) касается ок-
ружности M const в точке B . Величину можно определить из треугольника OBO1 с учетом теоремы косинусов
140
R2 A2 C2 2AC cos ,
откуда |
|
|
|
|
|
||
cos |
A2 |
C2 R2 |
|
|
|
||
|
|
. |
|
|
|
||
|
|
|
|
|
|||
|
|
|
2AC |
|
|
|
|
С учетом выражений для C , R получим |
|
|
|
||||
arccos |
|
M 2 A2(M 2 1) |
. |
|
(7) |
||
|
2AM 2 |
|
|||||
|
|
|
|
|
|
||
Из рис. 7 следует, что зависимость (7) существует только для модулей A, |
|||||||
лежащих в пределах A1 A A2 , где |
A1 M /(M 1), |
A2 M /(M 1) , |
M 1. |
||||
Вне этих пределов запас по фазе может быть любым, так как в этом случае ко-
нец вектора не может попасть в запретную область.
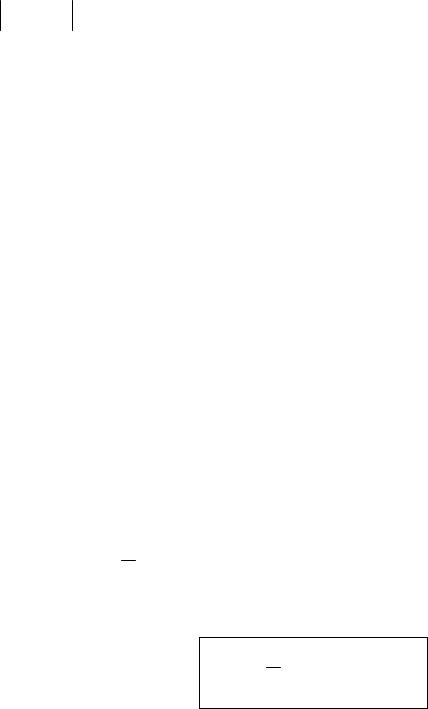
После построения АФЧХ разомкнутой системы W ( j ) показатель коле-
бательности M определяется по точке касания к одной из окружностей.
На рис. 8 представлена АФЧХ и окружности (6), на которых для удобства вместо значений M указаны значения 20lg M . Здесь значению 20lg M 4 дБ