

3. Колебания физического маятника
Физическим маятником называется твердое тело, совершающее колебания под действием силы тяжести вокруг неподвижной горизонтальной оси, не проходящей через центр масс С тела.
OC = l,
OO= L
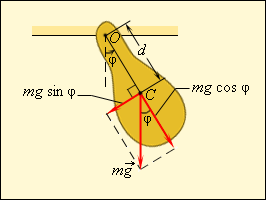
Рис.4.2. Колебания физического маятника
Если маятник отклонен из положения равновесия на угол , то уравнение динамики вращательного движения твердого тела можно записать так:
М = J;
=
![]() ;
;
M = Fr l
Вектор возвращающей силы Fr противонаправлен с положительным направлением оси x.
|
|
(4.8) |
т.к. угол мал, то sin .
Или
– mgl = J ,
тогда
|
|
(4.9) |
![]()
или
|
|
(4.10) |
тогда
|
|
(4.11) |
|
|
(4.12) |
приведенная длина маятника, т.е. L – длина такого математического маятника, период колебаний которого равен периоду колебаний физического маятника.
Точка О, отстоящая от точки О на продолжении прямой ОС на расстоянии приведенной длины L, называется центром качаний физического маятника.
По теореме Штейнера I = Ic + ml2 , тогда
|
|
(4.13) |
т.е. ОО всегда больше ОС.
Точка качаний и точка подвеса обладают свойством взаимозаменяемости.
§5. Фазовый портрет маятника. Адиабатический инвариант
Рассмотрим опять колебания пружинного маятника. Энергия системы определяется, как мы уже видели, следующим выражением:
|
|
(5.1) |
Введем вместо скорости импульс: р= mx´. Тогда равенство (5.1) можно переписать в таком виде:
|
|
(5.2) |
Разделим это равенство на W:
|
|
(5.3) |
или
|
|
(5.4) |
 .
.
В «пространстве» с координатными осями
x и p это уравнение эллипса с полуосями
![]() и
и
![]() .
Пространство с осями «координата -
импульс» называется фазовым пространством
системы.
.
Пространство с осями «координата -
импульс» называется фазовым пространством
системы.
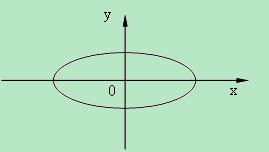
Рис 5.1. Траектория гармонического осциллятора в фазовом пространстве.
Таким образом, траектория гармонического осциллятора в фазовом пространстве представляет собой эллипс. А площадь эллипса, задаваемого уравнением: x²/a2+y²/b2=1. равна S = π a b, тогда площадь под фазовой траекторией определяется выражением:
|
|
(5.5) |
или
|
|
(5.6) |
Величина площади S, заключенной внутри фазовой траектории частицы, деленная на 2π, имеет в физике специальное название- адиабатический инвариант. Для гармонического осциллятора адиабатический инвариант определяется выражением:
|
|
(5.8) |
Величина I была названа адиабатическим инвариантом потому, что мы рассматривали движение при неизменных параметрах системы, то есть приколебаниях пружинного маятника (грузика на пружинке) неизменным параметрами были масса грузика и коэффиицент жесткости пружинки, т.е. величина k, а значит и частота ω.
Равенство (5.8) справедливо не только для колебаний грузика на пружинке, но и для любой другой системы, совершающей гармонические колебания, параметры которой испытывают медленные вариации со временем. Например, это может быть математический маятник, длина которого медленно меняется со временем.