

§3. Энергия механических гармонических колебаний
Пусть материальная точка совершает прямолинейные гармонические колебания вдоль оси координат х около положения равновесия, принятого за начало координат.
Тогда
|
|
(3.1) |
По определению
|
|
(3.2) |
|
|
(3.3) |
А по второму закону Ньютона:
F = ma , и Fmax= mamax, тогда с учетом (3.3) получаем:
|
|
(3.4) |
Сила пропорциональна смещению материальной точки из положения равновесия и направлена в противоположную сторону (к положению равновесия ).
|
|
(3.5) |
Запишем выражения для кинетической, потенциальной и полной энергии материальной точки.
По определению
|
|
(3.6) |
Т.к.
![]() ,
то
,
то
|
|
(3.7) |
Но W = Wк + Wp , тогда
|
|
(3.8) |
т. к. m = const, о = const, A = const, то следует вывод:
Вывод: Полная энергия остаётся постоянной, так как при гармоническом колебании справедлив закон сохранении механической энергии и упругая сила консервативна.
§4. Гармонический осциллятор. Колебания пружинного, физического и математического маятников
Система, совершающая колебания, описываемые уравнением вида:
|
|
(4.1) |
называется гармоническим осциллятором.
Колебания гармонического осциллятора являются важным примером периодического движения и служат точкой или приближенной моделью во многих задачах классической и квантовой физики.
Примером гармонического осциллятора являются: пружинный, физический, математический маятники, колебательный контур (для токов и напряжений столь малых, что элементы контура можно считать линейными).
1. Колебания пружинного маятника
Пружинный маятник – груз массой m, подвешенный на абсолютно упругой пружине и совершающий гармонические колебания под действием упругой силы : F = – kx, где k – жесткость пружины, х – смещение груза от положения равновесия.
Получим дифференциальное уравнение гармонического колебания пружинного маятника:
![]()
и
F = – kx ,
тогда
|
|
(4.2) |
|
|
(4.2) |
Сравнив (4.2’) и (4.1)
|
|
(4.3) |
тогда
|
|
(4.4) |
отсюда, учитывая, что о=2/Т, получим:
|
|
(4.5) |
период колебаний пружинного маятника.
Формула (4.5) выполняется для упругих колебаний, когда справедлив закон Гука, т.е. когда mпр mтела.
|
|
(4.6) |
потенциальная энергия пружинного маятника.
Fупр=-dWp/dx;
-Wp= -kxdx => Wp=kx2/2
Fт.упр консервативная сила, тогда
dA = - dWp;
![]() .
.
2. Колебания математического маятника
Идеализированная система, состоящая из математической точки массы m подвешенной на нерастяжимой невесомой нити и колеблющаяся под действием силы тяжести.
Пример: небольшой тяжелый шарик, подвешенный на тонкой длинной нити.
![]() ,
гдеN - сила реакции
нити на натяжении.
,
гдеN - сила реакции
нити на натяжении.
угол - мал.
х - путь, пройденный шариком.
х = l или = х / l ; тогда Fв = - mgx / l
Но о =
![]() ,
а Fупр = – kx , тогда mgx / l = kx
k = mg / l
,
а Fупр = – kx , тогда mgx / l = kx
k = mg / l
|
|
(4.6) |
|
|
(4.7) |
( 4.7) дифференциальное уравнение ГК математического маятника.
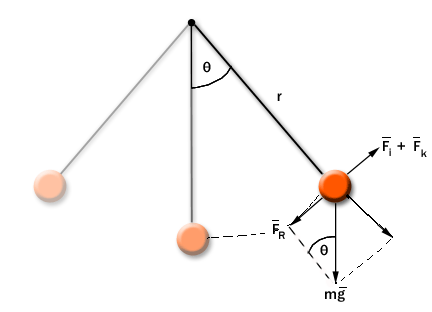
Рис. 4.1. Колебания математического маятника