

3.1.2 Статический расчет рамы и просмотр результатов.
Выбираем пункты верхнего меню: →Расчет →Общий.

В появившемся диалоговом окне выбираем опцию «Статический расчет». Запуск на расчет происходит после нажатия кнопки «ОК». Перед запуском на расчет частичный проект автоматически сохраняется20.
Выбираем пункт
меню →Проекты → Открыть…
или кнопку
![]() и открываем наш файл.
и открываем наш файл.
Выбираем пункты верхнего меню: → Результаты → Графика. В появившемся диалоговом окне ставим кружок в поле «Усилия» в окне «в стержнях» и нажимаем кнопку «ОК». |
|
|
В дополнительной планке переключателей нажимаем кнопку «M» (эпюра изгибающих моментов).21 |
|
|


В рабочем окне будет выведена эпюра изгибающих моментов22.

Рис. 25 Эпюра изгибающих моментов: Max M=7.00927 кНм (элемент 5), Min M=-30.6293 кНм (элемент 13)
После нажатия кнопок «Q» и «N» на экране будут выведены соответственно эпюра поперечных сил23

Рис. 26 Эпюра поперечных сил: Max Q=21.1551 кН (элемент 1), Min Q=-26.8449 кН (элемент 4)
и продольных сил
 Рис.
27 Эпюра продольных сил: Max
N=17.5307 кН (элемент 3), Min N=-26.8449 кН (элемент
5)
Рис.
27 Эпюра продольных сил: Max
N=17.5307 кН (элемент 3), Min N=-26.8449 кН (элемент
5)
3.1.3 Задание для самостоятельного расчета по теме рамы.
Рассчитать самостоятельно раму:

Рис. 28 Расчетная схема рамы

Рис. 29 Эпюра моментов М (кН·м), полученная методом сил.

Max M=67.997 кНм (элемент 4), Min M=-29.999 кНм (элемент 21)
Рис. 30. Эпюра моментов по компьютерному расчету.
3.1.4 Особенности работы рамы в пространственной постановке.
Попробуем завести ту же самую раму в пространственной постановке.
В верхнем меню выбираем последовательно пункты: → Редактировать24 → Геометрия → Создать: → -рама/ферма. |
|
||
В дополнительной планке переключателей в окне выбора нажимаем переключатели «3D-стержни», «Рамы», а затем нажимаем кнопку «Установить» |
|
||
Плоская рама расположена в плоскости XOZ. Привязка ее осуществляется при помощи одной точки P1. В окне информации появляется команда «Установите P1, начальную точку системы». В появившемся диалоговом окне задаем координаты этой точки (0, 0, 0) и нажимаем кнопку «ОК». |
|
||
В окне информации появляется команда «Установите точку P2, на положительной R-оси». В появившемся диалоговом окне задаем координаты этой точки, т.е. любой точки, лежащей на оси ОX, например, (1, 0, 0) и нажимаем кнопку «ОК». |
|
||
В окне информации появляется команда «Установите точку P3, точку в RS-плоскости». В появившемся диалоговом окне задаем координаты этой точки – любой точки в плоскости XOZ, не лежащей на оси OX, например (1, 0, 1) и нажимаем кнопку «ОК». |
|
||
Затем в новом диалоговом окне задаем угол поворота рамы относительно оси -R (в данном случае она совпадает с глобальной осью X) «Угол =0». |
|
||
В появившемся диалоговом окне задаем:
Затем нажимаем кнопку «ОК». |
|
||




Далее порядок действий тот же самый, что и для 2D-рамы, но:
распределенная нагрузка будет направлена вдоль глобальной оси Z;
материалы задаются для 3D-стержней (сдвиговые жесткости в этом случае автоматически задаются равными 0, а модули упругости по умолчанию принимаются как для железобетона);
при вводе узлового шарнира обнуляются моменты вокруг оси Y (шарнир с цифрой «16»).
Опорные закрепления вводятся по глобальным осям X и Z соответственно.
По идее, поскольку нагрузки действуют только в плоскости рамы, то указанных закреплений должно быть достаточно. Попробуем запустить раму на расчет. Расчет выполнен не будет и программа выдаст следующее сообщение:

Даже если нагрузки действуют только в плоскости рамы, в пространственной постановке рама должна быть закреплена также и из плоскости.
Лучше, чтобы схема закрепления из плоскости соответствовала реальной работе конструкции в здании (например, при расчете фермы логично закрепить ее в местах реального раскрепления ее из плоскости связями или распорками). Для обеспечения пространственной неизменяемости системы, плоская конструкция должна быть закреплена из плоскости как минимум в трех точках (если не накладываются ограничения на углы поворота).
Для обеспечения неизменяемости и сохранения симметрии закрепим нашу раму по оси Y на опорах и в крайних верхних точках, после чего повторно запустим на расчет.
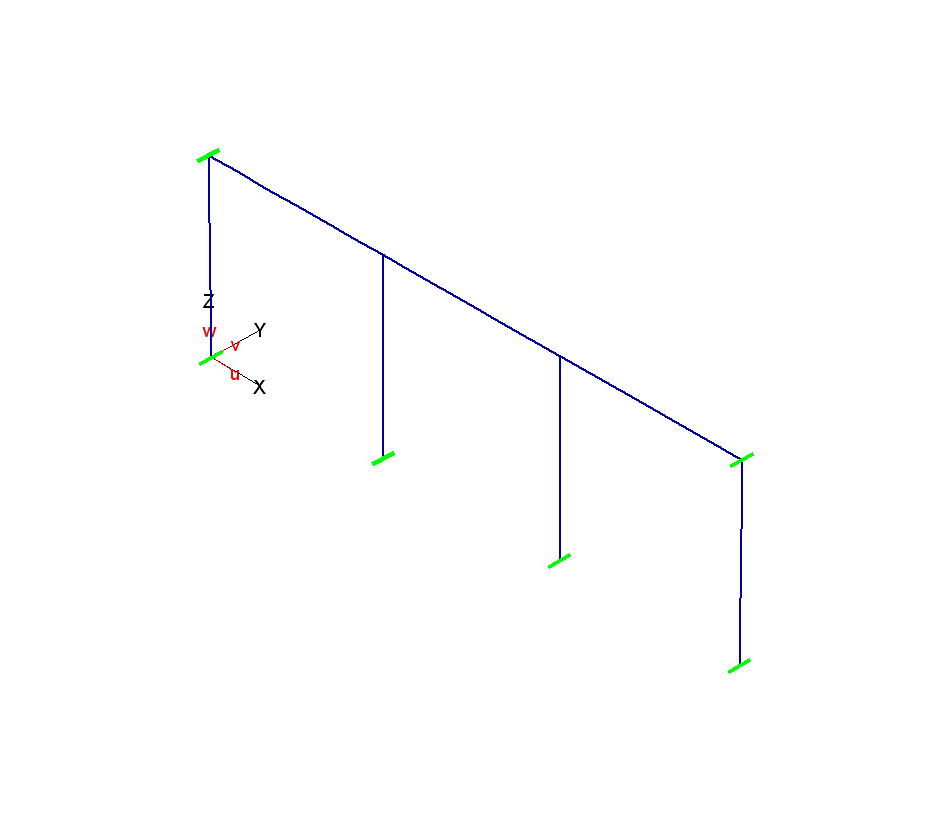
Рис. 31. Схема закрепления рамы из плоскости.
Результаты расчета представлены на рисунке.

Max Ms=73.3734 кНм (элемент 4), Min Ms=-29.0365 кНм (элемент 9)
Рис. 32. Эпюра изгибающих моментов M (кН·м).