

Режим электродинамического торможения
Под режимом электродинамического торможения понимается такой режим работы, когда обмотка статора отключается от сети переменного тока и подключается к источнику постоянного тока. Постоянный ток создает неподвижный в пространстве магнитный поток. При вращении ротора в неподвижном магнитном потоке в обмотках ротора будут индуктироваться э.д.с, которые в свою очередь вызовут появление тока в роторе.
Взаимодействие тока ротора с неподвижным магнитным потоком создает тормозной момент.
Существует несколько схем включения обмотки статора к источнику постоянного тока.
При электродинамическом торможении асинхронный двигатель работает в режиме синхронного генератора переменной частоты, поэтому большое значение на время торможения имеет величина включенного активного сопротивления в цепь ротора. Если в цепь ротора не включено добавочное сопротивление, то при больших частотах в роторе, что имеет место в начальный момент переключения, появляется составляющая поля реакции якоря по продольной оси, которая очень сильно ослабляет магнитный поток, созданный постоянный током и, следовательно, торможение будет неэффективным, т.е. время торможения увеличивается.
При введении добавочного сопротивления можно рассматривать работу асинхронного двигателя как работу синхронного генератора на активную нагрузку. При этом время торможения уменьшается.
Недостатком такого вида торможения является то, что ввиду малого активного сопротивления обмотки статора требуется сеть постоянного тока низкого напряжения или же будут иметь место потери в добавочном сопротивлении, включенном в цепь статора.
Увеличение величины постоянного тока уменьшает время торможения.
Порядок выполнения работы
До начала исследования производится ознакомление с электрооборудованием установки.
Естественная механическая характеристика снимается при номинальном напряжении и при отсутствии внешних сопротивлений в цепи ротора.
При определении мощности на валу электродвигателя пользуются кривой зависимости Рсети=f(Рвала).
При снятии механических характеристик в режиме рекуперативного торможения необходимо предварительно проверить направление вращения АД и G, который подключается к сети как двигатель, с помощью пакетного выключателя S2; пуск машины постоянного тока производится при полностью введенном сопротивлении RГ и выведенном сопротивлении RВ. Убедившись, что электродвигатели вращаются в одну сторону, при отключении S2 пускают асинхронный электродвигатель, затем, установив движки реостатов RГ в положение "введено" и RВ в положение "выведено", устанавливают S2 в положение "сеть" и затем RГ выводится.
С помощью переключателей переключают токовые обмотки ваттметров. Ослабляя поле электродвигателя постоянного тока, введением сопротивления RВ снимают все данные, необходимые для расчета и построения механических характеристик.
При остановке электродвигателей необходимо выполнить следующее: вывести реостат в цепи возбуждения двигателя постоянного тока RВ, ввести реостат в цепи якоря RГ, поставить S2 в положение "отключено", после этого отключить асинхронный двигатель.
Запрещается первым отключать АД. При снятии данных для построения механических характеристик достаточно получить 4-5 точек.
Определение мощности на валу производится по той же кривой зависимости Рсети=f(Рвала). В этом случае полученная мощность по приборам Рсети на графике откладывается по оси Рвала и находится Рвала по оси Рсети. Допущенная ошибка из-за увеличения вентиляционных потерь невелика, т.к. разность в скоростях в двигательном и генераторном режимах незначительная.
5. При снятии зависимостей t=f(IТ) необходимо реостат в цепи возбуждения двигателя RВ, полностью ввести (для создания минимального потока), произвести на клеммнике переключение на зажимы RТ, включить S1, установить величины постоянного тока 5, 9, 12 Ампер, снять для каждого значения тока напряжение и время торможения.
Порядок снятия характеристики: установить с помощью реостата ток 5 Ампер, произвести пуск асинхронного двигателя кнопкой SB2 (Пуск), выводя пусковой реостат RП после того, как двигатель достигнет установившейся скорости вращения, нажать одновременно кнопку SB1 (Стоп) и на пусковой механизм секундомера. Определить время торможения. Затем повторить тоже для всех других значений тока.
Для снятия характеристики: с введенным сопротивлением в цепи ротора, пуск производится так же, как указано выше, но до нажатия кнопки SB1 (Стоп) быстро устанавливается на реостате RП сопротивление 4 Ома. Затем определяется время торможения по секундомеру.
Таблица 4.1 - Экспериментальные и расчетные данные
№/№ |
Экспериментальные данные |
Расчетные данные |
|||||||||
UС |
ІС |
P1 |
ω |
UГ |
ІГ |
RД |
М2 |
s |
cosφ |
η |
|
В |
А |
Вт |
рад/сек |
В |
А |
Ом |
Н·м |
|
|
|
|
1 2 3 4 … |
|
|
|||||||||
Примечание:
![]() ;
;
Поскольку
мощность АДФ и нагрузочного генератора
![]() примерно
равны, тогда
примерно
равны, тогда
![]() .
.
Коэффициент
полезного действия определяется по
формуле
![]() ;
;
Имея
s
и
М1
построить зависимость: M=f(S);
n=f(M),
где
![]() .
.
![]() (Н·м),
(Н·м),

Рисунок 4.1 – Механические характе- Рисунок 4.2 – Механические харак-
ристики АД для различных теристики АД для случая изменения
сопротивлений ротора подведенного к статору напряжения
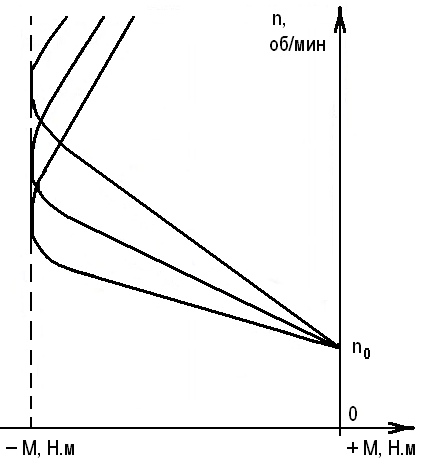
Рисунок 4.3 – Механические характеристики для режима рекуперативного торможения