

Проверка прочности по различным теориям
Вычисление главных и эквивалентных напряжений в стержневых, плоскостных и объемных конечных элементах по усилиям от отдельных загружений, а также по расчетным сочетаниям загружений (РСН) или по РСУ производится при помощи системы ЛИТЕРА.
Главные напряжения
Главные напряжения вычисляются в соответствии с видом напряженно-деформированного состояния (НДС), полученного в результате расчета схемы. Каждый тип конечных элементов обладает определенными особенностями, соответствующими тому НДС, которое ими моделируется при создании расчетной схемы. Так, например, КЭ балки-стенки моделируют плоское напряженное состояние и т.п.
В общем случае НДС в точке тела описывается шестью осевыми компонентами тензора напряжений:
 (12.1)
(12.1)
Возможны случаи, когда какие-либо напряжения равны нулю. Для плоского НДС, например, тензор напряжений принимает вид:
 (12.2)
(12.2)
В любом случае главные напряжения выстраиваются так: N1N2N3.
Кэ плоской задачи теории упругости
Моделируется плоское напряженное состояние в плоскости X1OZ1.
Главные напряжения вычисляются в центре тяжести каждого элемента в его срединной поверхности:
 (12.3)
(12.3)
Угол наклона наибольшего главного напряжения N1 к оси X1:
![]() (12.4)
(12.4)
Кэ плиты
Моделируется напряженное состояние в плоскости X1OY1, характеризуемое изгибными усилиями. Осевые напряжения вычисляются для нижней и верхней поверхностей:
![]() (12.5)
(12.5)
h-толщина плиты.
Главные напряжения и углы их наклона вычисляются по формулам (12.3) и (12.4).
В срединной поверхности возникают касательные напряжения:
![]() (12.6)
(12.6)
которые при вычислении главных напряжений игнорируются.
Кэ объемного ндс
Определение главных напряжений в этом случае производится из решения кубического уравнения.
![]() (12.7)
(12.7)
где :
Корни уравнения (12.7):
 (12.8)
(12.8)
где
:
Главные напряжения:
![]() (12.9)
(12.9)
Затем вычисляются направляющие косинусы углов наклона осей к осям местной системы координат КЭ из системы уравнений вида:
![]() (12.10)
(12.10)
где i=1,2,3.
Решив систему трижды, получим матрицу направляющих косинусов:
 (12.11)
(12.11)
В этом случае вычисляются три угла Эйлера, определяющие положение трех главных напряжений относительно местной системы координат (рис. 12.1):
(тета)- угол (нутации) между положительными направлениями осей OZ1 и N3 (0 );
(пси) - угол (прецессии) между осью OX1 и осью OA (линия пересечения плоскостей X1OY1 и N1ON2), положительное направление которой выбирается так, что OA, OZ1 и N3 образуют правую тройку. Угол отсчитывается от оси OX1 к OY1 (0 2)
- (фи) - угол (чистого вращения) между осями N1 и ОA отсчитывается от оси N1 к N2 (0 2).
Значения углов Эйлера определяются так:
= arccos (n3) (12.12)
При = 0, = 0, = arcsin (m1),
причем если l1 0, то = -arcsin (m1).
Если 0, то = +2 . (12.13)
При
0
![]() ,
причем если
,
причем если
![]() ,
,
то
![]()
Если 0, то = +2 . (12.14)
Далее
![]()
причем
если
![]() ,
,
то
![]() .
.
Если 0, то = +2 .
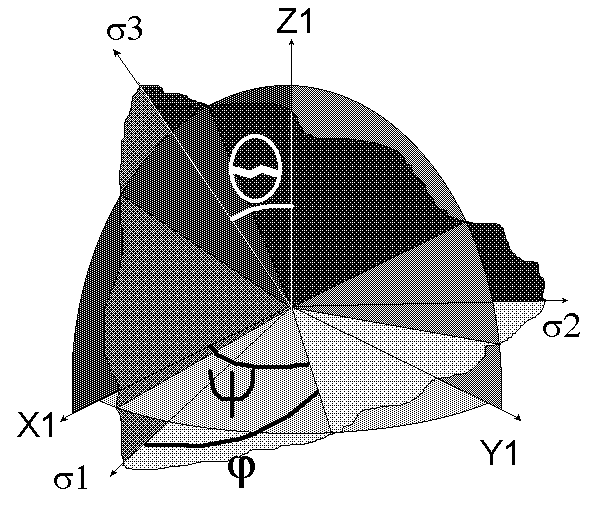
Рис. 12.1
Кэ оболочки
Моделируется напряженное состояние (в плоскости X1OY1), характеризуемое нормальными и касательными напряжениями в срединной поверхности, а также изгибными усилиями.
Осевые напряжения вычисляются для нижней и верхней поверхностей:
![]() (12.15)
(12.15)
Главные напряжения для этих поверхностей вычисляются по формулам (12.3) и (12.4).
В срединной поверхности игнорируется влияние напряжений Txy, Tyz от перерезывающих сил.
Вид НДС
Для объемных конечных элементов производится вычисление параметра Лоде-Надаи, характеризующего вид НДС.
![]() (12.16)
(12.16)
Значение
= 1 - характеризует чистое сжатие;
= 0 - чистый сдвиг;
= 1 - чистое растяжение.