

37.Автоматическое регулирование угловой скорости асинхронного эп при помощи тиристорного регулятора напряжения
![]()
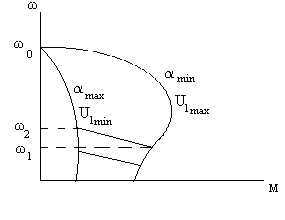
Схема предн-на для плавного и глубокого рег-я угл-й ск-ти разл-х произв-х мех-в.VS1-VS6 получают имп-сы упр Ua от с-мы упр. СУ кот-я, обесп-т их сдвиг на угол упр-я a в ф-ции сигнала упр. Uу. Кот-й предв-но усил-ся усил-м У с коэфф. Усил-я kу.Uу это результ-щая сравнения 2-х сигналов: сигнала задания Uз и сигнала ОС по ск-ти Uос с датчика ск-ти (тахогенератора BR). Сигнал aо необх--м при работе Д в замк. С-ме, т.к. по мере увеличения нагр. угол a должен уменьш-ся от мак. Знач. (135 0) до мин. Поэтому при отсут-ии Uу на тир-ры будет под-ся сигнал, обеспеч-щий угол откр-я тир-в a о
Достоинства: высокий КПД, простота обслуживания. Недостатки Uу 6 данный способ регулирования является неэкономичным поэтому использ-ся при кратковрем-х реж-х работы.
38.Принципиальная схема системы с подчинённым регулированием
![]()
![]() предназначена
для регулирования скорости асинхронного
двигателя изменением частоты напряжения
питания статора АД.Напряжение с задатчика
интенсивности ЗИ непосредственно
поступает для задания частоты на вход
автономного инвертора АИ и через
функциональный преобразователь ФП на
вход регулятора напряжения РН. На входе
РН сигнал сравнивается с сигналом
обратной связи по напряжению с датчика
напряжения ДН. Результирующий сигнал
поступает на вход регулятора тока РТ,
где сравнивается с сигналом обратной
связи по току с датчика ДТ на основе
шунта RS
и поступает для задания напряжения на
вход управляемого выпрямителя УВ.
Элементы C0
и L
выполняют роль фильтра в схеме.
39.ОСНОВНЫЕ
СВЕДЕНИЯ О КАСКАДНЫХ СХЕМАХ.(КС)Каскадные
схемы прим.для ЭП с АД с ФР,в установках
ср.и большой мощности,работающих в
продолжительном режиме работы и при
относ.небольших диапазонах регул.Каскадные
схемы позваляют полезно исп.энергию
скольжения,повышая,при этом эффективность
ЭП.Они легко поддаются автоматизации.КС
делятся на:1.Элекрт.
2.электромех-ие.
В
электр.энергия скольжения возвр-ся в
эл.сеть,а в эл.мех-их с помощью,с помощью
вала,передаётся рабочей машине.По типу
устр-ва,преобр.энергию скольжения
бывают:
1.Эл.машинные.2.вентильно-машинные
3.вентильные.
Эл.магн.каскады с АД не получили широкого
применения,т.к.в цепь ротора необходимо
вкл.одноякорный преобр.,который имеет
большую инерционность.также
прим.одноякорного преобр. усложняет
схему и ухудшает усл.коммутации.Вентильномашинные
и вентильные более просты в схемной
реализации.
предназначена
для регулирования скорости асинхронного
двигателя изменением частоты напряжения
питания статора АД.Напряжение с задатчика
интенсивности ЗИ непосредственно
поступает для задания частоты на вход
автономного инвертора АИ и через
функциональный преобразователь ФП на
вход регулятора напряжения РН. На входе
РН сигнал сравнивается с сигналом
обратной связи по напряжению с датчика
напряжения ДН. Результирующий сигнал
поступает на вход регулятора тока РТ,
где сравнивается с сигналом обратной
связи по току с датчика ДТ на основе
шунта RS
и поступает для задания напряжения на
вход управляемого выпрямителя УВ.
Элементы C0
и L
выполняют роль фильтра в схеме.
39.ОСНОВНЫЕ
СВЕДЕНИЯ О КАСКАДНЫХ СХЕМАХ.(КС)Каскадные
схемы прим.для ЭП с АД с ФР,в установках
ср.и большой мощности,работающих в
продолжительном режиме работы и при
относ.небольших диапазонах регул.Каскадные
схемы позваляют полезно исп.энергию
скольжения,повышая,при этом эффективность
ЭП.Они легко поддаются автоматизации.КС
делятся на:1.Элекрт.
2.электромех-ие.
В
электр.энергия скольжения возвр-ся в
эл.сеть,а в эл.мех-их с помощью,с помощью
вала,передаётся рабочей машине.По типу
устр-ва,преобр.энергию скольжения
бывают:
1.Эл.машинные.2.вентильно-машинные
3.вентильные.
Эл.магн.каскады с АД не получили широкого
применения,т.к.в цепь ротора необходимо
вкл.одноякорный преобр.,который имеет
большую инерционность.также
прим.одноякорного преобр. усложняет
схему и ухудшает усл.коммутации.Вентильномашинные
и вентильные более просты в схемной
реализации.
40.Эп с вентильно-машинным каскадом
Обмотка
статора основного АД подкл. к сети
переменного тока, о роторная обмотка
через выпрямительный мост, по которому
передаётся энергия скольжения с ДПТ,
обозначенного М2. М2 мех. соед. с СГ М1,
который передаёт энергию скольжения в
сеть (за исключением потерь). Регулирование
угловой скорости АД осущ. изменением
добавочной ЭДС создаваемой М2 в цепи
выпрямленного тока посредством изменения
тока возбуждения М2. Ток протекающий в
цепи выпрямленного напряжения, он
обозначается Id.
![]() ,
Где Еd0
– среднее значение ЭДС на выходе
выпрямительного моста при скольжении
-> S=1,Едоб
– добавочное ЭДС, определяемое противоЭДС
М2, 2△U
– падение напряжения на диодах, RЭ
– эквивалентное сопротивление роторной
цепи. Для того чтобы построить мех.
хар-ки определим как изменится ω0
при изменении Едоб.
,
Где Еd0
– среднее значение ЭДС на выходе
выпрямительного моста при скольжении
-> S=1,Едоб
– добавочное ЭДС, определяемое противоЭДС
М2, 2△U
– падение напряжения на диодах, RЭ
– эквивалентное сопротивление роторной
цепи. Для того чтобы построить мех.
хар-ки определим как изменится ω0
при изменении Едоб.
![]() , Е2К
– линейное напряжение на кольцах ротора
АД. Из этой формулы видно, что при увелич.
Едоб
угловая скорость ω0
снижается. Полное использование АД
достигается в случае пост. момента
нагрузки на валу.
, Е2К
– линейное напряжение на кольцах ротора
АД. Из этой формулы видно, что при увелич.
Едоб
угловая скорость ω0
снижается. Полное использование АД
достигается в случае пост. момента
нагрузки на валу. ![]()