

14.Схема управления эп на бесконтактных логических элементах
Назначение схемы. Схема предназначена для управления нереверсивным магнитным пускателем с запоминанием командного входного сигнала.
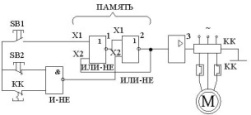 В
данной схеме запоминание командного
входного сигнала осуществляется с
помощью двух логических элементов
ИЛИ-НЕ, когда сигнал с выхода элемента
2 будет поступать на вход х2 элемента 1
по цепи обратной связи. Вместо
электромеханического магнитного
пускателя или контактора исполнительным
аппаратом может быть бесконтактный
пускатель, например тиристорный. Тогда
узел схемы нереверсивного включения
двигателя будет представлять почти
бесконтактную схему управления.
Достоинство схемы в том, что она дает
возможность бесконтактного управления
контактором. Недостаток схемы в отсутствии
аппаратов защиты от КЗ.
В
данной схеме запоминание командного
входного сигнала осуществляется с
помощью двух логических элементов
ИЛИ-НЕ, когда сигнал с выхода элемента
2 будет поступать на вход х2 элемента 1
по цепи обратной связи. Вместо
электромеханического магнитного
пускателя или контактора исполнительным
аппаратом может быть бесконтактный
пускатель, например тиристорный. Тогда
узел схемы нереверсивного включения
двигателя будет представлять почти
бесконтактную схему управления.
Достоинство схемы в том, что она дает
возможность бесконтактного управления
контактором. Недостаток схемы в отсутствии
аппаратов защиты от КЗ.
17.П – РЕГУЛЯТОР
Основным
элементом аналогового пропорционального
регулятора является операционный
усилитель, в обратную связь которого
включен резистор. Выходное напряжение
П-регулятора пропорционально входному.
Передаточная функция:![]()
18.И – РЕГУЛЯТОР
![]()
![]()
Основным
элементом аналогового интегрального
регулятора является операционный
усилитель, в обратную связь которого
включен конденсатор. Выходное напряжение
И-регулятора определяется интегралом
от входного Переходная характеристика
Передаточная функция:![]()
19.ПИ – РЕГУЛЯТОР
![]() Основным
элементом аналогового
пропорционально-интегрального регулятора
является операционный усилитель, в
обратную связь которого включены
последовательно резистор и конденсатор.
Переходная функция данного регулятора
это сумма переходных функций П-регулятора
и И-регулятора.
Основным
элементом аналогового
пропорционально-интегрального регулятора
является операционный усилитель, в
обратную связь которого включены
последовательно резистор и конденсатор.
Переходная функция данного регулятора
это сумма переходных функций П-регулятора
и И-регулятора.
Переходная характеристика
Передаточная функция:
20.ИП – РЕГУЛЯТОР
![]()
![]()
Uвых/Uвх= (R1/RO)(1/R1C1p+1)=k(1/Tp+1)
21.ПД – РЕГУЛЯТОР
![]()
![]()
Uвых/Uвх=((R1+R2)/RO)[1+p(R1R2/R1+R2)C]=k[1+Tp]
22.ПИД – РЕГУЛЯТОР
![]()
![]()
Uвых/Uвх=((R1+R2)[1+p(R1+R2)C1])/RO*
*(1+p[(R1R2/R1+R2)C2])/( p(R1+R2)C1) =k[1+Tp](1+Tp/TOp)
23.ПРИНЦИП РАБОТЫ ЗАДАТЧИКА ИНТЕНСИВНОСТИ Задатчик интенсивности ЗИ-1 предназначен для преобразования быстрых изменений вх. U в линейно зависимое U переменного тока. Время отработки задания от 0,5 до 2 сек. С помощью патанциометра R2.
24.Датчик на основе шунта
Шунт-4-ёх
зажимный резистор с чисто активным
сопр.К зажимам подкл.силовая цепь и
цепь упр.,при этом сопр.шунта должно
быть миним-ым,чтобы он не влиял на ток
в цепи дв.Поэтому,номинал.падение напр.
на шунте должно быть 75vkD/D
дальнейшем.неохадимо увеличивать до
3-3.5 В.коэф.передачи: ![]()
![]() .
.
25.Датчик скорости.(дс)
Для
получения эл.сигнала.пропорционального
угловой скорости ротора ЭД исп.:1.в
аналоговых САУ-. тахогенераторы;2.в
цифровых САУ- Импульсные ДС. Тахогенератор
с пост.магнитами,встр.в ЭД.Осн.хар-ка:зависимость
ЭДС от скорости ![]() .КТГ-коэф.передачи
тахогенератора(крутизна хар-ки).В
импульсных ДС
исп.импульсные преобр.перемещения,у
которых кол-во импульсов пропорциональна
углу поворота вала.Исп.2 варианта
цифрового изменения скорости основания
на цифровой реализации варажения
.КТГ-коэф.передачи
тахогенератора(крутизна хар-ки).В
импульсных ДС
исп.импульсные преобр.перемещения,у
которых кол-во импульсов пропорциональна
углу поворота вала.Исп.2 варианта
цифрового изменения скорости основания
на цифровой реализации варажения
![]() .Где
.Где![]() -угол
поворота вала за время
-угол
поворота вала за время ![]() ,
,![]() -число
импульсов преобразователя за время
-число
импульсов преобразователя за время
![]() .
Z-число
импульсов преобразователя за один
оборот вала.При первом варианте,осуществляет
подсчёт импульсов
.
Z-число
импульсов преобразователя за один
оборот вала.При первом варианте,осуществляет
подсчёт импульсов ![]() ,за
фиксированный интервал
времени,ΔТ.
,за
фиксированный интервал
времени,ΔТ.![]() .Применяется
при больших скоростях вращения вала.Второй
вариант.осуществляется
измерение временного интервала,за
который от преобразователя поступает
фиксированное число импульсов.
.Применяется
при больших скоростях вращения вала.Второй
вариант.осуществляется
измерение временного интервала,за
который от преобразователя поступает
фиксированное число импульсов.![]() .Применются
на низких скоростях.
.Применются
на низких скоростях.