

1.Пуск дпт независимого возбуждения в функции тока
![]()
![]()
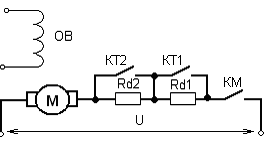
Схема предназначена для пуска ДПТ независимого возбуждения в функции тока. В цепь якоря ДПТ включены пусковые резисторы Rd2, Rd1 для избежания повышения тока при пуске. Раскройте принцип действия схемы.В схеме используется реле тока КА. Оно обладает небольшим сопротивлением и при токе большем I1 реле КА срабатывает, при меньшем - отпускает свои контакты. При нажатии кнопки SB1 срабатывает реле КМ и замыкает своими контактами якорную цепь, шунтирует кнопку «пуск» и подаёт напряжение к цепям реле КТ1 и КТ2. При первом броске тока срабатывает токовое реле КА и его размыкающее контакты разрывают цепь обмоток реле КТ1 иКТ2 . По мере разгона двигателя до угловой скорости ток якоря уменьшается до значения I1 и токовое реле КА отпускает свои контакты . Питание получает реле КТ1. Своими контактами оно шунтирует резистор Rд1 в цепи якоря, шунтирует размыкающий контакт КА в цепи КТ2, но из-за броска тока контакт КА в цепи КТ2 размыкается и по мере разгона до угловой скорости ток упадёт и КА отпустит свой контакт замкнув цепь КТ2. Реле КТ2 шунтирует резистор Rд2. Остановка двигателя осуществляется кнопкой SB2.
Достоинства и недостатки схемы. Достоинства: Простата схемной реализации Недостатки: Ступенчатый пуск с бросками тока.
2. Пуск дпт независимого возбуждения в функции времени
Назначение схемы. Схема предназначена для автоматизации процесса пуска ДПТ, за счет использования реле времени. Разомкнутые схемы обеспечивают защиту ЭП при возникновении не нормальных режимов работы: КЗ, перегрузок ДВ, исчезновения напряжения питания, обрыва одной из фаз и т.д.
![]()
Во избежание повышения тока при пуске в цепь якоря ДПТ включены пусковые резисторы Rd2, Rd1. Автоматизация процесса пуска заключается в использовании реле времени, которые после включения цепи якоря контактором КМ через определенные промежутки времени замыкают сначала контакт КТ1, а затем КТ2, тем самым шунтируя пусковые резисторы Rd1 и Rd2 соответственно. Время выдержки реле подбираются так, чтобы на момент включения контактов КТ1 и КТ2 угловая скорость двигателя достигала значений ωd и ωb соответственно. механическую характеристику пуска в функции времени
Достоинства: Простата схемной реализации Недостатки: При снижении напряжения сети или увеличение момента сопротивление (нагрузка на валу) длительность разгона возрастает и при срабатывании контакторов КТ1 и КТ2, угловая скорость не достигает значений ωd и ωb - это вызовет увеличенные броски тока.
3. Пуск дпт в функции тока в две ступени и динамическое торможение в функции времени
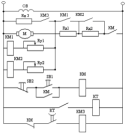

Схема предназначена пуска ДПТ независимого возбуждения в функции ЭДС и динамического торможения в функции времени. Разомкнутые схемы обеспечивают защиту ЭП при возникновении не нормальных режимов работы: КЗ, перегрузок ДВ, исчезновения напряжения питания, обрыва одной из фаз и т.д. Принцип действия:В этой схеме в качестве датчиков ЭДС используется якорь двигателя, к которому подключены контакторы КМ1, КМ2.С помощью регулировочных резисторов Rу1 и Rу2 настраиваются на срабатывание на отдельных скоростях двигателя контакторы КМ1 и КМ2. Для осуществления торможения в схеме предусмотрен резистор Rd3, подключение и отключение которого осуществляется контактором торможения КМ3. Для обеспечения необходимой, при торможении, выдержки времени используется реле времени КТ, замыкающий контакт которого включают в цепь КМ3. После нажатия SB1 срабатывает контактор КМ, подключая якорь двигатель к сети с включением в цепь якоря Rd1 и Rd2 и шунтирует SB1, замыкает цепь КТ и размыкает КМ3. По мере разгона срабатывает КМ1, шунтируя Rd1 и затем КМ2, шунтируя Rd2. Для перехода в режим торможения нажимаем SB2, КМ теряет питание, отключая двигатель от сети, и замыкает размыкающий контакт цепи КМ3. Тем самым КМ3 подключает якорь двигателя к Rd3. Одновременно разомкнется контакт КМ в цепи реле КТ, оно потеряет питание и начнет отсчет выдержки времени, соответствующий времени торможения. По истечении времени задержки контакт КМ3 отключит Rd3 из цепи якоря и схема вернется в исходное состояние. механические характеристики вид механических характеристик. Разгон двигатель начинает по характеристике 1, после шунтирования Rd1 двигатель переходит на характеристику 2, а после шунтирования Rd2 двигатель переходит на характеристику 3. Торможение происходит по характеристике 4.