

26.Назначение сифу
Принцип упр.тиристорами:для откр.тиристоров,необх.2 условия:1.потенциал анода должен быть больше потенциала катода.2.на управл.электрод,должен быть подан упр.импульс. появление положительного напр.между анодом и катодом,наз.моментом естественного откр. тиристора(МЕО).Подача упр. импульса может быть задержана относ.МЕО и тем самым можно рег-ть напр. на вых.выпрямителя.СИФУ преднозначена для упр. тиристорами и вып.след.ф-ии
29.Замкнутая система «преобразователь-двигатель» с оос по скорости
На валу ДПТ находится датчик скорости — тахогенератор ТГ, выходное U которого Uтг, пропорциональное скорости ДПТ, является сигналом OC.
Сигнал ОС сравнивается с задающим сигналом скорости и их разность в виде сигнала рассогласования подается на вход дополнительного усилителя У, который с коэффициентом Ky усиливает сигнал рассогласования Uвх и подает его в виде сигнала управления Uу на вход преобразователя П.
Для получения электромех. и мех. хар-ки:
![]()
![]()
![]()
Kc=γ*Ky*Kn/c –общий коэф. усиления системы.
с=K*Фном,K=pN/2Па – конструктивный коэф.
p-число пар полюсов N-число активных проводников обмотки якоря. а-число ║ ветвей обмотки якоря.
Рассмотрим физическую сторону процесса регулирования скорости в данной системе. Предположим, что ДПТ работает под нагрузкой в установившемся режиме и по каким-то причинам увеличился момент нагрузки Мс. Так как развиваемый ДПТ момент стал меньше момента нагрузки, его скорость начнет снижаться и соответственно будет снижаться сигнал ОС по скорости. Это, в свою очередь, согласно уравнению Uвх=Uзс-γ*ω вызовет увеличение сигналов рассогласования Uвх и управления Uy и приведет к повышению ЭДС преобразователя, а следовательно, U и скорости ДПТ. При уменьшении момента нагрузки ОС действует в другом направлении, приводя к снижению ЭДС преобразователя. Т. о., благодаря наличию ОС осуществляется автоматическое регулирование ЭДС преобразователя и тем самым подводимого к ДПТ U, за счет чего получаются более жесткие характеристики ЭП.
2 – ха-ка замкнутой системы.3 – разомкнутой.
∆ωp-перепады скорости в разомкнутой системе.
∆ωз- перепады скорости в замкнутой системе.
Т![]() .
к. Kс>0,
то всегда ∆ωз<∆ωp.
.
к. Kс>0,
то всегда ∆ωз<∆ωp.
30.Замкнутаясистема «преобразователь-двигатель» с нелинейной ос по скорости
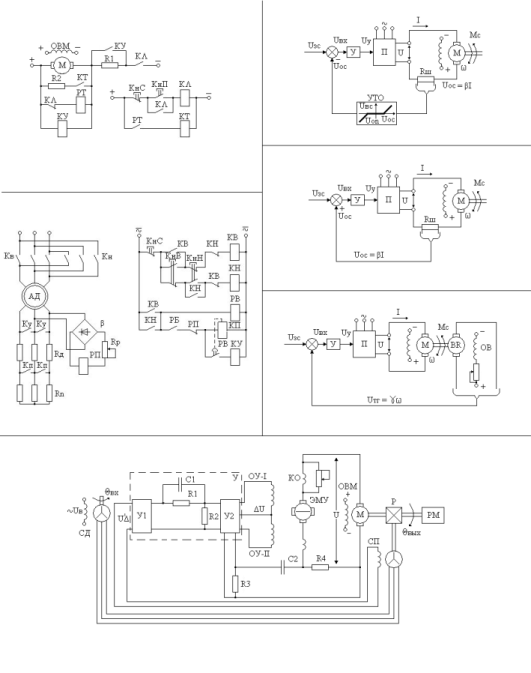
В качестве датчика тока может быть использован шунт с сопротивлением Rш, падение напряжения на котором пропорционально току якоря I. В результате сигнал OC по току Uо.т = β*I, где β — коэффициент OC по току, имеющий размерность Ом. Сигнал обратной связи Uо.т поступает на узел токоограничения УТО, называемый также узлом токовой отсечки, вместе с сигналом задания тока Uз.т. Этот сигнал определяет уровень тока отсечки Iотс, с которого начинается регулирование тока. При токе в якоре, меньшем заданного тока отсечки сигнал обратной связи на выходе УТО равен нулю., ЭП в диапазоне тока 0...Iотс является разомкнутым и имеет характеристики, изображенные на рис. в зоне I. При I>I0ТС на выходе УТО появляется сигнал OOC Uо.т = β*I, ЭП становится замкнутым и начинает работать в зоне II. Для пояснения вида характеристик ЭП в этой зоне запишем выражение для сигнала рассогласования Uвх= Uз.с - β*I.Отсюда видно, что при увеличении I сигнал Uвх уменьшается, что вызовет уменьшение сигнала Uy и Еп. Это приведет к уменьшению U на двигателе и соответствующему снижению тока в якоре двигателя. W=((ky*kn*Uзад)/c) – (I(Rя+Rп-kc)/c) Эл/мех хар-ка: W=((ky*kn*Uзад)/c) – (M(Rя+Rп-kc)/c
Где kc =kу*kп*в – общий коэффициент усиления системы
![]()
1 – хар-ка при kя+kп=kс
2 – хар-ка при kя+kп<kс
3 - хар-ка при kя+kп>kс.Однако из-за непостоянства kс в результате наличия положительной ОС реальные хар-ки имеют нелинейный вид х-ка 4. Потому такая ОС используется в совокуп-ти с дугими.
31.ОБОБЩЁННАЯ
СТРУКТУРА СИСТЕМЫ С ПОДЧИНЁННЫМ
РЕГУЛИРОВАНИЕМ Сист.подчинённого
рег-я хар-ся каскадным вкл.регуляторов,
кол-во кот-х соотв.кол-ву рег-х параметров
ЭП, таких как, ток и напр.якоря, скорость
вращ. Д, положение вала и др.. На вых.
рег-ра каждого из конт-ров сравн сигналы,
пропорц-е заданному и действ-му значениям
вых. координаты данного контура, а вых
напр.рег-ра служит задающим сигналом
для послед. контура. На
рис.:
X1З…X2З
– вх.сигналы контуров; W1(p)…W3(p)–передат-е
ф-ции регуляторов; W1З(p)…W3З(p)
– передат-е ф-ции контуров; Х1…Х3
– вых.величины контуров. Важным дост-м
данной стр-ры, явл возможность простыми
средствами осущ ограничение любой из
коорд с-мы. Для этого достаточно ограничить
на соотв.уровне задание данной корд-ты.
Для разл.условий пределы огран-я могут
быть неизменными, либо изменяться по
зад. з-ну. Перед ф-ция объекта рег-я,например,
первого контура, запишется ![]()
32.СХЕМА
ЭП С ОДНОФАЗНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ
Здесь
приведена схема ЭП по сист.тиристорный
преобр-ль-двигатель с 1-фазным нереверс
преобр-м с 0-м выводом. Силовая часть
преобр-ля обр-на 2 тирист-ми VS1
и VS2,
кот-е анодами присоед.ко 2- обмоткам
тр-ра TV.
Якорь Д-М через сглаживающий дроссель
Др вкл.между ср. точ-й тр-ра и катодами
тирист-в. Упр-е осущ.импульсами UУ1
и UУ1.
Ср.знач.преобр-ля ЭДС опред.: ![]() ,
где Ed0
– ср.зн.ЭДС нупр-го выпр-ля.
,
где Ed0
– ср.зн.ЭДС нупр-го выпр-ля. ![]() .
Где m
– число фаз выпрямителя; u2
– деств.зн.напр.вторичной обмотки тр-ра.
На рис.показаны мех хар-кипривода при
различных задающих напр.(UЗ)
и соотв.углов регулирования (α), которые
имеют след.способности: меньшую по
сравнению с естеств.жёсткость хар-к
из-за наличия сопрот.преобразователя
R
и сглаживающего дросселя Др; расположение
хар-к только в первом и четвёртом
квадратах Id≥0,
что определяется односторонней
проводимостью преобразователя; наличие
области (заштрихованной на рисунке), в
которой хар-ки управления становится
нелинейным. Причина её появления
заключается в возникновении режимов
прерывистых токов.
.
Где m
– число фаз выпрямителя; u2
– деств.зн.напр.вторичной обмотки тр-ра.
На рис.показаны мех хар-кипривода при
различных задающих напр.(UЗ)
и соотв.углов регулирования (α), которые
имеют след.способности: меньшую по
сравнению с естеств.жёсткость хар-к
из-за наличия сопрот.преобразователя
R
и сглаживающего дросселя Др; расположение
хар-к только в первом и четвёртом
квадратах Id≥0,
что определяется односторонней
проводимостью преобразователя; наличие
области (заштрихованной на рисунке), в
которой хар-ки управления становится
нелинейным. Причина её появления
заключается в возникновении режимов
прерывистых токов.