26. Выбор числа разрядов слова данных по требуемой точности системы управления.
1) Система управления положением:
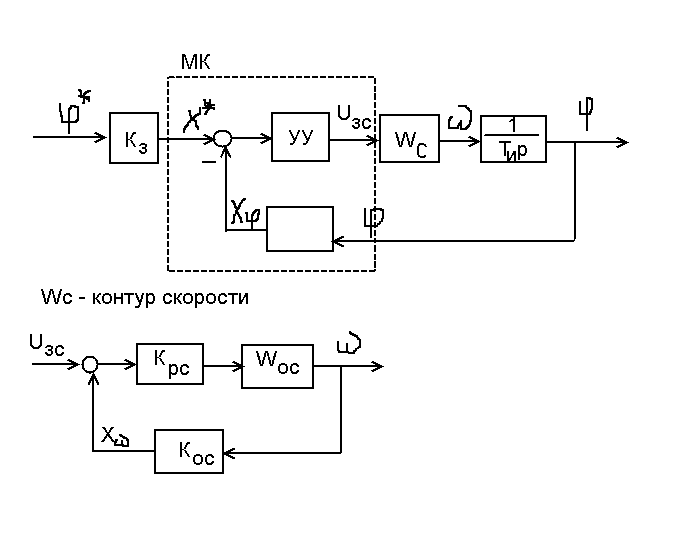
2) Система управления скоростью:
Для таких систем обычно задаются

Т ребуемое
количество разрядов контроллера при
интерполяции определяется на основании
формулы:
ребуемое
количество разрядов контроллера при
интерполяции определяется на основании
формулы:
 ,
(1)
,
(1)
где K – количество разрядов контроллера.
Таким образом, для нахождения разрядности микроконтроллера, необходимо решить неравенство:
 .
(2)
.
(2)
Таким образом, исходя из заданной точности, для реализации программы управления необходимо к разрядов.
27. Рекурсивные и нерекурсивные цифровые фильтры, их передаточные функции и структурные схемы. Алгоритм и программа цифрового фильтра.
Цифр. Фильтр называется рекурсивным, если сигнал на его выходе зависит от знач. Вых. Сигнала на предыдущих шагах.


По последнему выражению составим структурную схему:
Цифр. Фильтр допускает аппаратную программную реализацию. Аппаратная реализация выполняется на основании структурной схемы. Для аппаратной реализации применяются процессорные матрицы. Каждый процессор выполняет 1-ну или несколько операций.
Для программной реализации цифрового фильтра используется переход от z-изображения к оригиналу.

Необходимые
параметры
 ,
а также начальные условия:
,
а также начальные условия: .
При переходе к след. Шагу расчета должны
возрастать, т. есть в памяти необходимо
хранить вход. и выход. величины на 2-х
пропущенных шагах.
.
При переходе к след. Шагу расчета должны
возрастать, т. есть в памяти необходимо
хранить вход. и выход. величины на 2-х
пропущенных шагах.

Перейдем к рекурсии:
Нерекурсивный фильтр

Структура фильтра имеет след вид:
КИХ и БИХ
Импульсная хар-ка (ИХ) - реакция на ед. импульс:
Такая (ИХ) является конечной (КИХ). Рекурсивные фильтры обычно имеют бесконечную имп. характеристику.
28. Цифровое дифференцирование и интегрирование.
Непрерывный интегратор имеет передаточную функцию:

Цифровое дифференцирование
Если на вход подать последовательность импульсов, то на выходе будет 1 импульс
29.Способы повышения производительности микропроцессора. Конвейерное выполнение команд. Пример микроконтроллера с конвейерным выполнением команд.
Совершенствование архитектуры дает повышение производительности без повышения тактовой частоты. Усовершенствование архитектуры, увеличивает коэффициент использования.
1980г.-организация памяти, расслоение памяти (КЭШ).
1990г.-процессоры с длинным командным словом, конвейеры(LIW).
2000г.-многоядерные процессоры.
Все это распараллеливает обработку информации.
Параллелизм:
Векторный - на уровне программ крупнозернистый.
Скалярный - на уровне команды мелкозернистый.
1)

2) 1-на команда много данных.
 3)Много
команд, одни данные.
3)Много
команд, одни данные.
Скалярный параллелизм. За счет усовершенствования аппаратных средств. Конвейерное выполнение помогает расслоению памяти. Применение КЭШ-памяти.
Позволяет сократить суммарное выполнение команды.
Недостаток – при конвейерной организации закрывается ветвление, затрудняется прерывание.
Процессор называется суперконвейерным если он содержит конвейер вложенностью не менее 5-ти ступеней.
Суперскалярный процессор кода имеет более 5-ти работающих параллельно конвейеров. Позволяет за 1-н такт выполнить несколько команд.
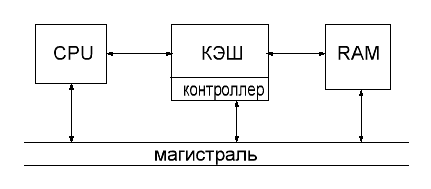
30. КЭШ-память, ее назначение и принцип действия
КЭШ – дополнительная высокоскоростная память, в которой дублируется часть активного пространства основной памяти. При таком решении при обращении к памяти вначале анализируется КЭШ; если нужная информация в нем отсутствует, то происходит обращение к основной памяти. Она предназначена для временного хранения данных и команд. КЭШ память не занимает адресного пространства.
Контроллер КЭШ «памяти» работает по алгоритму позволяющее учесть обновление данных. Высокое быстродействие КЭШ обусловлено выполнением его на статических элементах памяти (триггеры). Возможны несколько уровней КЭШ памяти.