

19.Аналого-цифровое преобразование.
АЦП применяються в замкнутых системах для преобразования непрерывных велечин на входе датчиков в двоичный код.
4 способа кодирования непрерывной величины с помощью двоичного кодирования.
1) Прямой и обратный
Допустим
 .
Обозначим
- max
значение модуля двоичного кода.
.
Обозначим
- max
значение модуля двоичного кода.

Прямой код Обратный код


1 в старшем разряде обозначает минус
2) дополнительный код смещённый

Погрешность АЦП: зависит от кол-ва разрядов и способов кодирования.
Абсолютная погрешность равна 1 младшего разряда

Относительная погрешность зависит от преобразования величин
 .
.
Для уменьшения погрешности в окрестности нуля применяются нелинейное преобразование
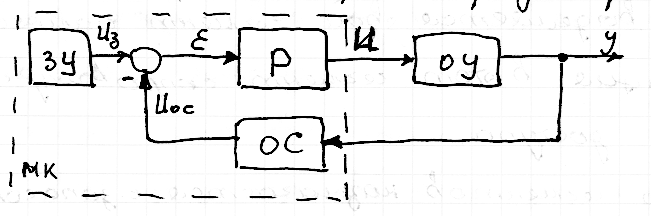
23. Микроконтроллер, его функциональная схема и применение в системе управления электроприводом
Применение микропроцессоров в системах управления
Микроконтроллером называется интегральная схема для применения в системах управления.
DSP(П ЦОС)-процессор для цифровой обработки сигналов.
Функции микроконтроллера:
1.Сбор и обработка информ.
2.формирование задающих сигналов

3.выполнение алгоритма регулятора.
Системы:
1.Цифровые
2.Аналого-цифровые
3.Системы с прямым цифровым управлением.
Цифро-аналоговая система:
Преимущества: Быстродействие и низкая стоимость.
Недостатки: низкая надежность и помехоустойчивость, невысокая точность.
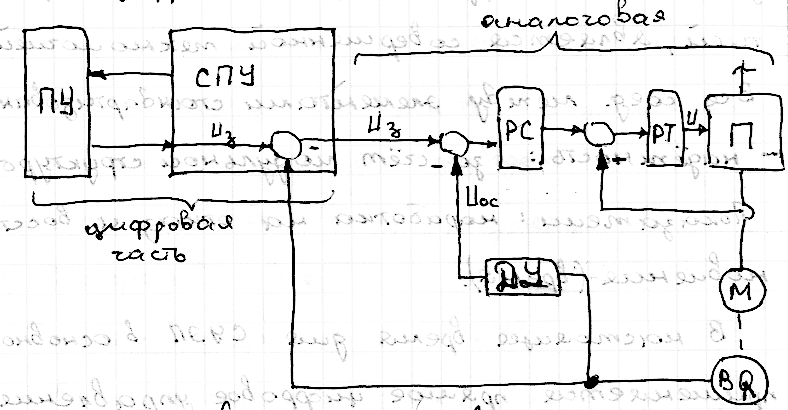
Аналого-цифровые системы.


 Система
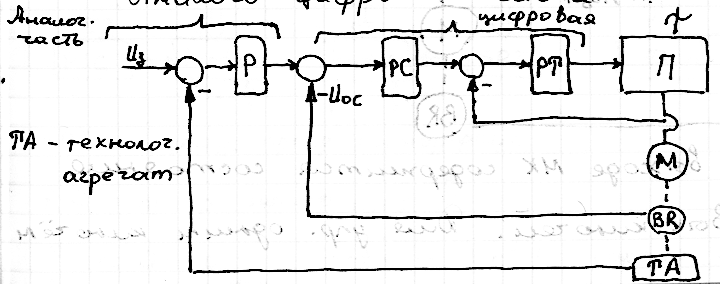
с прямым цифровым управлением.
Система
с прямым цифровым управлением.
Преимущества цифровой обработки сигналов:
-помехоустойчивость:1. За счет кодирования 2.цифровые устройства апредставляют собой законченные модули и изготовлены с гарантией, является совершенной технологией. Все соед. между элементами стандартизированы.
-надежность: за счет модульной структуры.
Показатели: наработка на отказ и восстановление(время).
В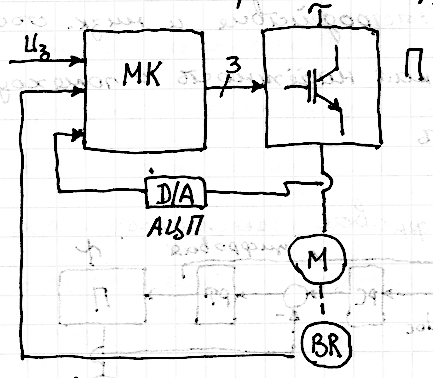 настоящее время для СУЭП в осноаном
применяется прямое цифровое управление.
настоящее время для СУЭП в осноаном
применяется прямое цифровое управление.
На выходе МК содержится состояние силовых ключей. Для управления одним ключем требуется 1 бит в выходном порту МК.
МК выполняет ШИМ сигнала управления.
Требования к м\с МК:
1.наличие развитого интерфейса для ввода и вывода сигналов
2.система команд должна содержать умножение и деление, а также умножение с накоплением( сумма произведений). Это для расчета вых. Величины регулятора Р.
3.быстродействие
Наличие аппаратного ШИМ.
Функциональная схема МК.
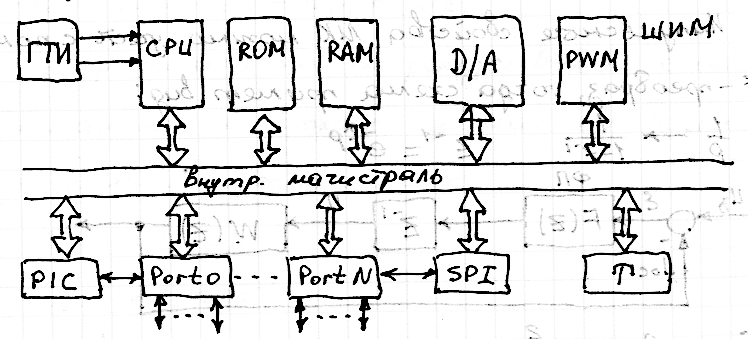
SPI- послед. прогр. Интерфейс
PIC- прогр. контр. прерыв.
Т-таймер
Port 0-Port N-параллельные порты
24. Влияние времени выполнения программы микроконтроллером на запас устойчивости замкнутой системы.

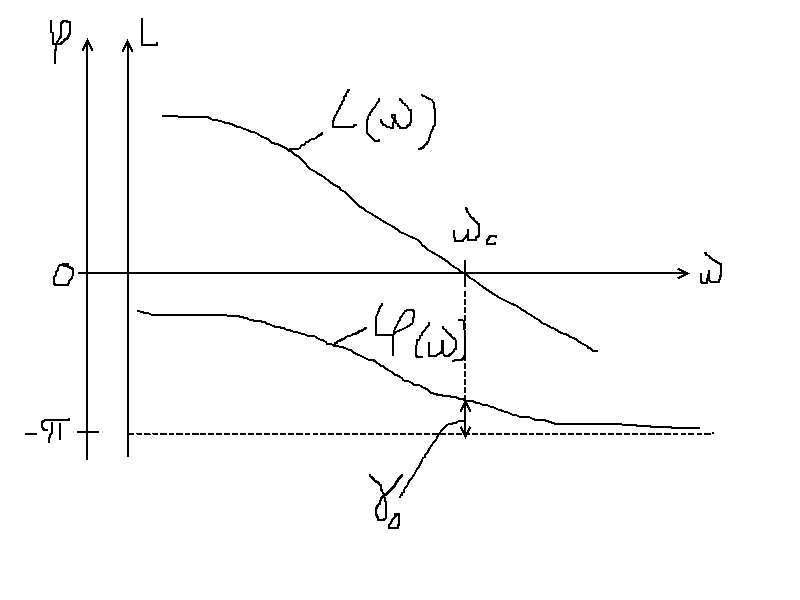
Запаздывание в МК равно времени обработки информации τ. Запаздывание приводит к изменению помехоустойчивости контура:
τз ≈ 2τ÷1,5τ
В современных МК собираются добиться малого τ, поэтому величиной запаздывания τ можно пренебречь и считать МК безынерционным звеном.
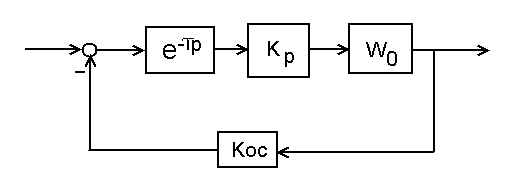
25. Микроконтроллер как динамическое звено.
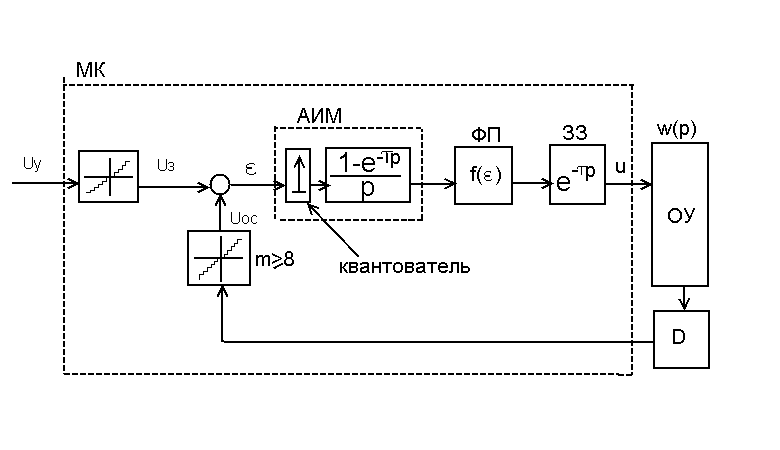
АИМ – амплитудно-импульсная модуляция
ЗЗ – звено запаздывания
ФП – функциональный преобразователь
Микроконтроллер обладает запаздыванием τ:


U
←амплитудная модуляция
0 τ τ t
Переход к Z – преобразованию

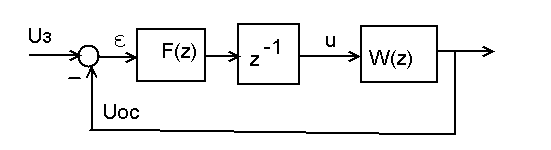
если τ<<(2/ωс) , то можно использовать непрерывную модель системы с непрерывной передаточной функцией W(p).
W(p) →F(p)→F(z)