

56. Применение искусственной нейронной сети в качестве устройства управления.
Искусственная нейронная сеть (ИНС) имеет на выходе векторный сигнал. Представим, что
 .
.
Такой объект можно представить, как:
Б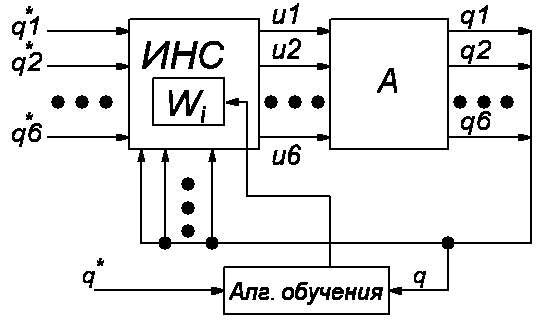 лагодаря
тому, что есть алгоритм обучения, система
делается адаптивной. Адаптация:
лагодаря
тому, что есть алгоритм обучения, система
делается адаптивной. Адаптация:
1. Сигнальная (формирует компенсирующий сигнал, который улучшает динамику системы).
2. Параметрическая (перенастраивает параметры регулятора при отклонении динамики от оптимальной)
Достоинство: ИНС может обеспечивать как сигнальную, так и параметрическую настройку.
Недостаток: Отсутствуют методы расчета количества слоев и выбора количества нейронов в слое.
Структура ИМС с применением модели:
Г де
стрелки с полосой – основной контур,
без полосы – контур адаптации.
де
стрелки с полосой – основной контур,
без полосы – контур адаптации.
 -
идеальный случай – процесс обучения
не происходит.
-
идеальный случай – процесс обучения
не происходит.
Если ОУ изменился, то
 .
Начинается процесс обучения до тех
пор, пока
.
Начинается процесс обучения до тех
пор, пока
 ,
,
 - заданная величина. Для обучения может
быть применен метод обратного
распространения ошибки.
- заданная величина. Для обучения может
быть применен метод обратного
распространения ошибки.