

7.Програмные средства интерфейса для управления электроприводами
Программный способ ввода-вывода информации означает, что программа содержит команды опроса внешних портов для организации ввода-вывода.
Программный микроконтроллер выполнен в реальном времени, поэтому чтобы своевременно учитывать внешние события, программы должны выполняться циклически и чем короче период цикла, тем быстрее реагирует система на событие.
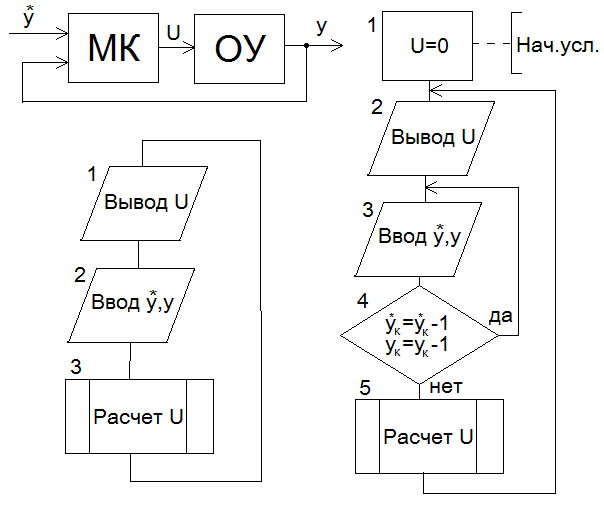
Чем больше информации нужно вводить, тем больше команд содержит программа, а следовательно она будет дольше выполняться.
Поэтому программная организация ввода-вывода имеет 2 недостатка:
Загромождение основной программы операциями ввода-вывода.
Увеличивается время выполнения управления программ (снижается быстродействие системы). Например, реакция на аварийные сигналы при программной реализации может запаздывать. В связи с этим применяется аппаратная организация ввода-вывода.
8. Параллельный и последовательный интерфейс. Области применения
Д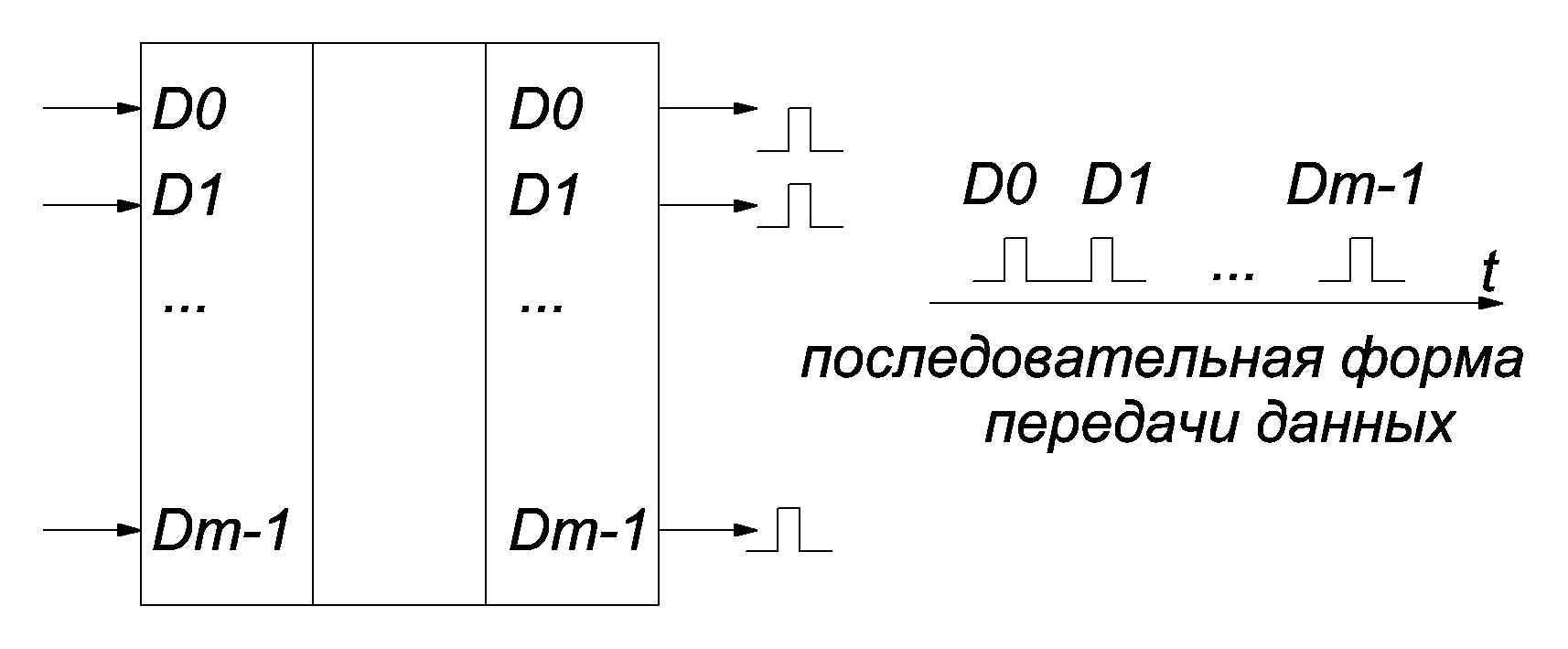
 воичная
информация хранится или в ячейках памяти
или в
регистрах.
Регистр может быть выполнен как отдельное
устройство, где хранится слово данных,
слово данных хранится в параллельном
виде.
воичная
информация хранится или в ячейках памяти
или в
регистрах.
Регистр может быть выполнен как отдельное
устройство, где хранится слово данных,
слово данных хранится в параллельном
виде.
Для преобразования данных из параллельной формы в последовательную применяется мультиплексор. Для преобразования из последовательной в параллельную – демультиплексор.
П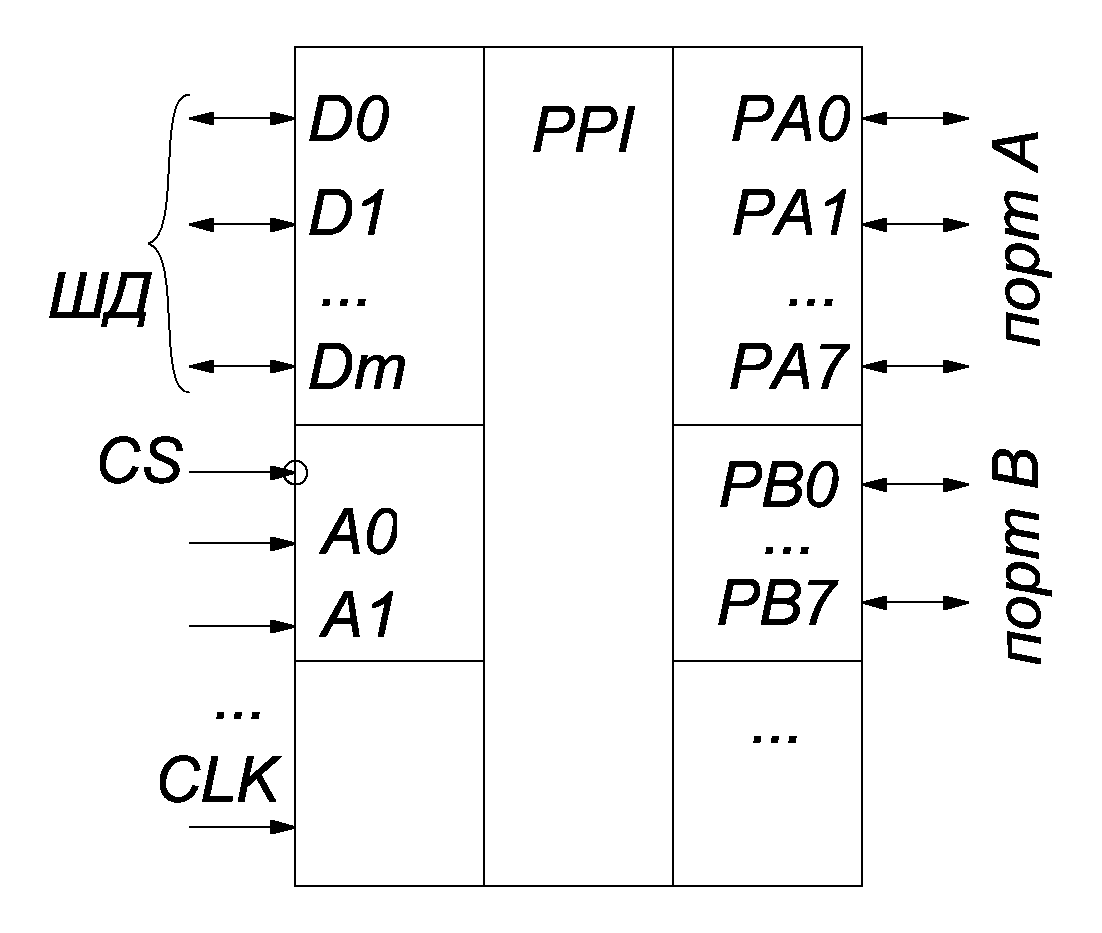 араллельный
программируемый интерфейс (ППИ, PPI).
араллельный
программируемый интерфейс (ППИ, PPI).
Порт – это регистр для временного хранения данных при вводе и выводе. ППИ служит для ввода и вывода параллельных данных. ППИ может содержать несколько параллельных портов и управляющие регистры. Каждый порт и управляющий регистр имеют адреса в адресном пространстве МП. Каждый бит управляющего слова предназначен для настройки опр. режима ввода-вывода.
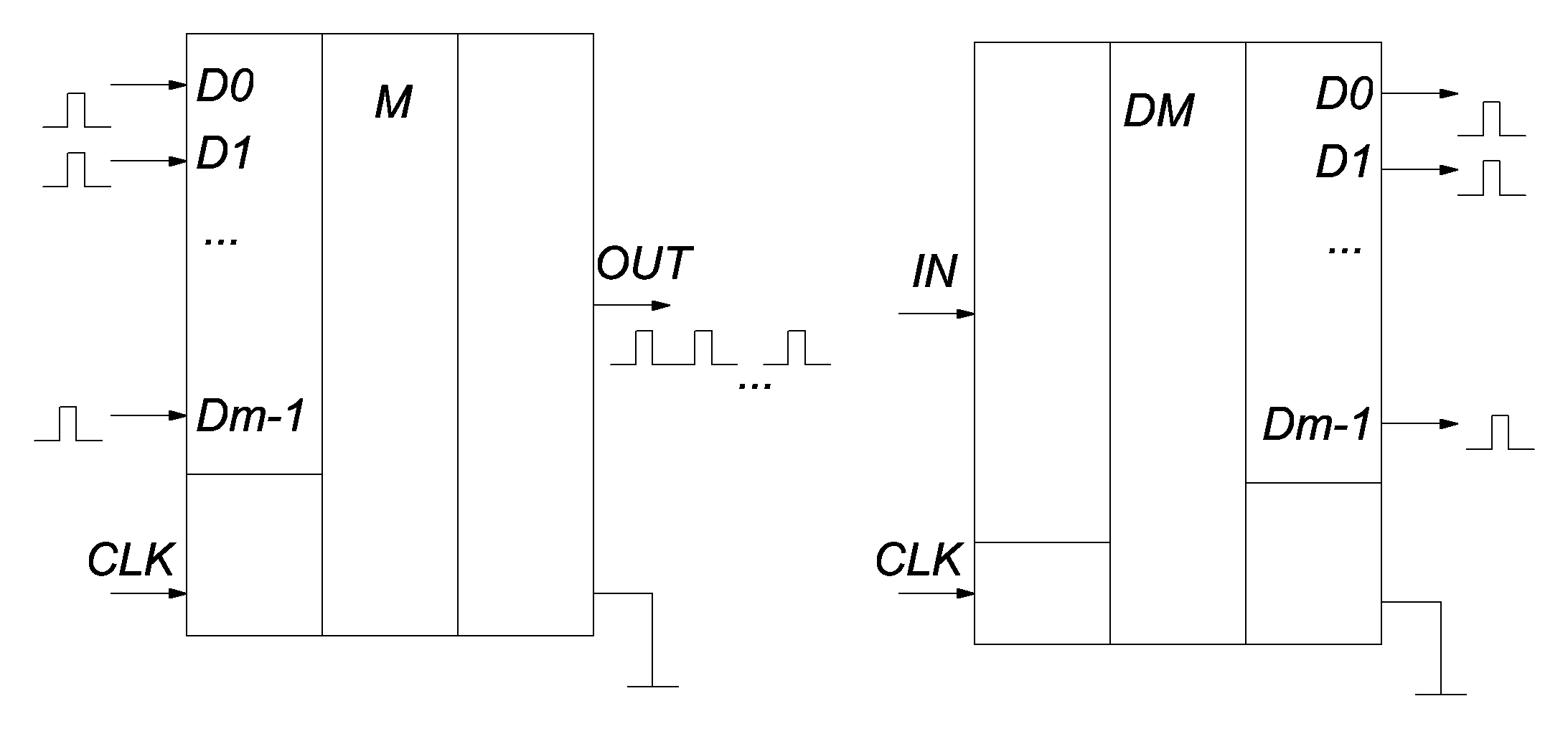
Устройство последовательного интерфейса(SPI).
UART(управляемый асинхронный приемопередатчик УАПП)
У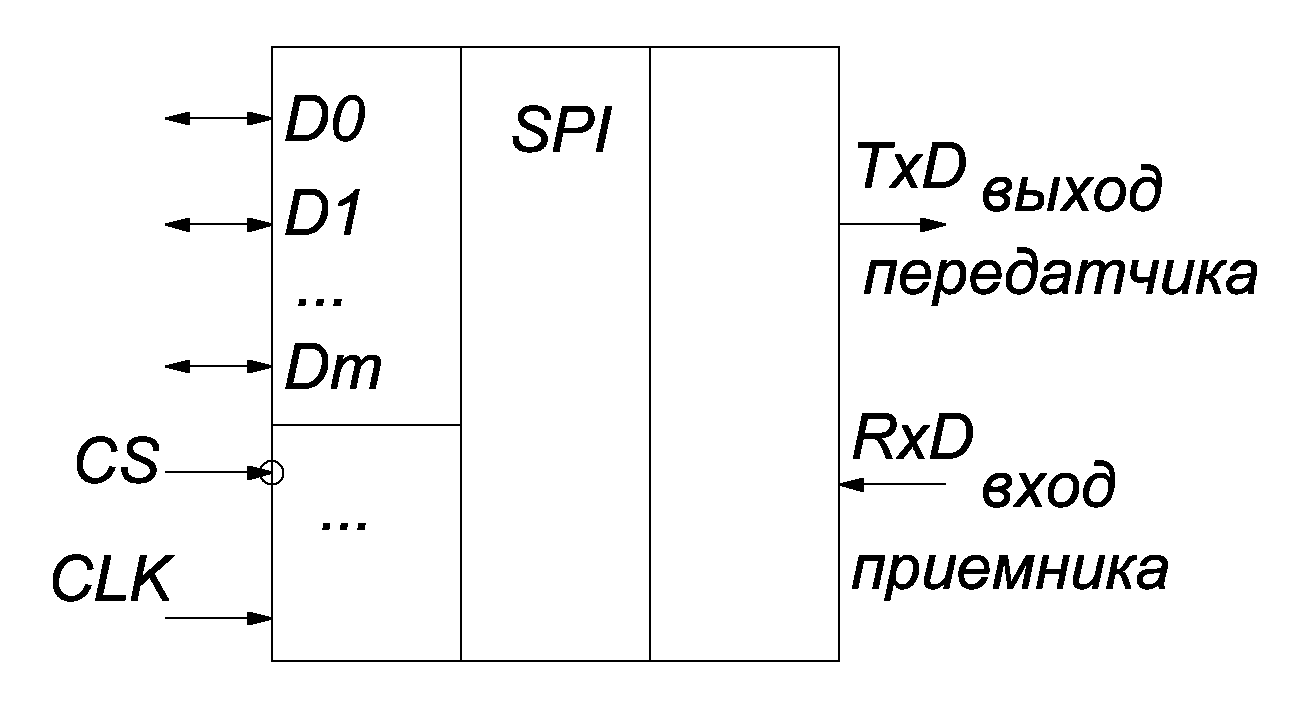 АПП
– предназначен для преобразования
данных из параллельной формы в
последовательную для передачи по линиям
связи и наоборот.
АПП
– предназначен для преобразования
данных из параллельной формы в
последовательную для передачи по линиям
связи и наоборот.
УАПП должен содержать мультиплексор и демультиплексор.
Области применения параллельного и последовательного интерфейса.
Параллельный интерфейс обладает в m раз большим быстродействием с одной стороны. Параллельный интерфейс имеет большее количество проводов. Последовательный интерфейс обеспечивает помехоустойчивость. Параллельный интерфейс допускается применять на расстоянии до 1 м из-за низкой помехоустойчивости. Параллельный интерфейс применяется для передачи на короткие расстояния, последовательный интерфейс применяется для передачи информации по линиям связи.
9. Принцип действия программируемого таймера.
Программируемый таймер предназначен для отсчета интервалов времени и для времязадающих функций (формирование последовательности импульсов, импульсная модуляция, управление устройствами в функции времени).
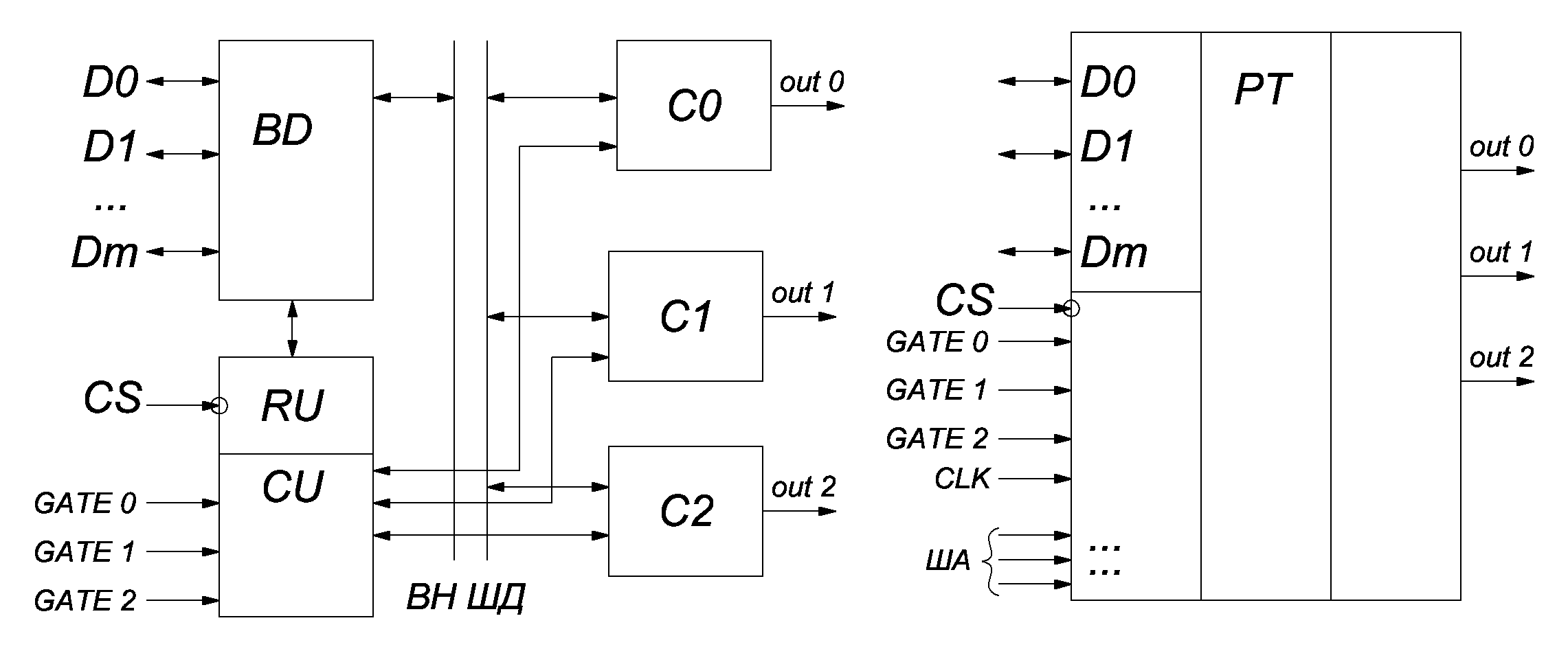
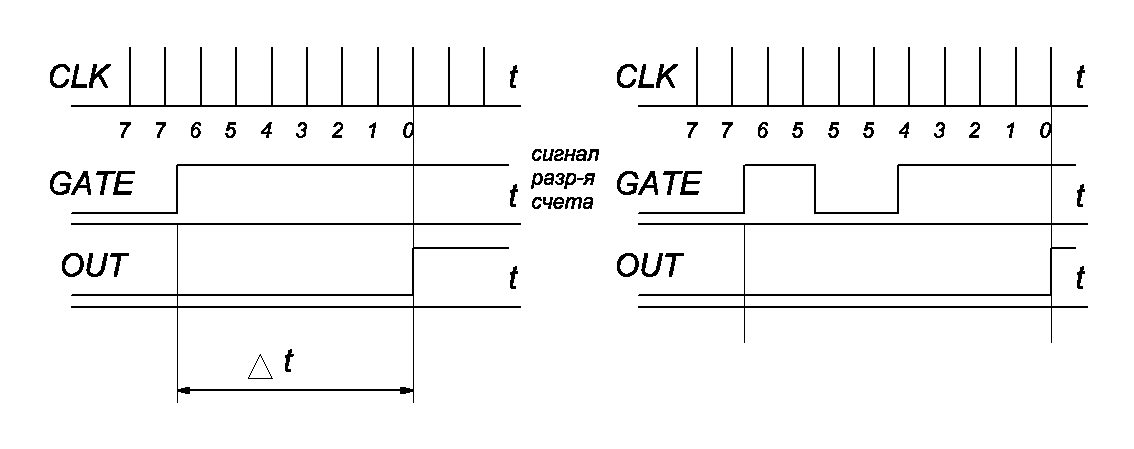
Вначале в управляющий регистр записывается управляющее слово, оно определяет режимы работы таймера. Режимы: режим таймера, режим счетчика. В режиме таймера формируется временной интервал. В режиме счетчика организуется счет количества внешних импульсов. При задании режима можно задать направление счета(инкрементирование, декрементирование). Далее составляется управляющее слово и записывается в регистр. В счетчик записывается значение пропорциональное интервалу времени (таймер). Чтобы запрограммировать таймер он должен быть подключен к CPU. После того как таймер запрограммирован, он может работать вместе с CPU, или самостоятельно. Чтобы таймер начал работу необходимо на вход разрешения счета подать импульс.
N=7, режим таймера, работа на декрементирование.
Обычно таймеры входят в состав микроконтроллеров.
Пример:
Δt=0,01 с; ft=1 МГц;
определить значение, которое нужно записать в счетчик таймера чтобы получить необходимое Δt
N= Δt· ft=10000=213+210+29+28+24
0010 0111 0001 0000 = 271016