

38. Система команд микроконтроллера msp430. Пример составления программы.
2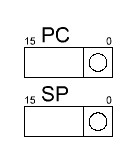 ,
4, 6 байт – длина команды. Адрес 16-ти
разрядного слова. Адрес расположения
команды всегда чётный, а в двоичной
системе исчисления чётное число всегда
оканчивается нулём.
,
4, 6 байт – длина команды. Адрес 16-ти
разрядного слова. Адрес расположения
команды всегда чётный, а в двоичной
системе исчисления чётное число всегда
оканчивается нулём.
Z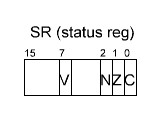 =1
если 0. V
– флаг переполнения, равен 1 если число
выходит за допустимые пределы для
знаковых чисел.
=1
если 0. V
– флаг переполнения, равен 1 если число
выходит за допустимые пределы для
знаковых чисел.

Прерывание называется режим работы процессора когда основная или фоновая программа прерывается по запросу внешнего устройства, выполняется ввод/вывод, возврат в основную программу и продолжение её выполнения. Позволяет разгрузить основную программу от опроса внешних устройств.
Наличие прерываний позволяет микроконтроллеру оперативно реагировать на внешнюю обстановку. 27 команд
Адресная часть содержит информацию об операндах.
Команда с двумя операндами. 4 бита содержат операции.
D – регистр назначения
S – регистр источник
4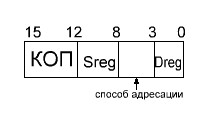 бита позволяют адресоваться к внутренним
регистрам процессора.
бита позволяют адресоваться к внутренним
регистрам процессора.
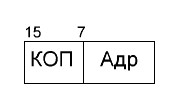 –
с
одним операндом
–
с
одним операндомБез операнда – команды условного и безусловного перехода
MOV R5, R6 – содержимое R5 помещается в R6, но остаётся в R5.
Ортогональная система команд позволяет с помощью каждой команды обращаться по всем адресам со всеми возможными способами адресации.
Пример:
MOV R5, R15 – R5 в R15
MOV.b R4, R5 – младший бит R4 в младший бит R5
39 .Система команд микроконтроллеров архитектуры adsp-bf. Пример составления программы
-Allreg определяет любой из регистров: R[7:0], P[5:0], SP, FP, I[3:0], M[3:0], A0.X, RETS, RETI, RETN, RETE, LC[1:0], USP и другие;
- DIVS, DIVQ – операции деления со знаком и без;
- MAX, MIN – оп-ции опред. наиб. и наим. из значений в регистрах-ист.;
- ABS абсолютное значение старшей и младшей частей 32 р. регистра;
- RND – округление полуслова
Общая характеристика системы команд:
Система команд ориентирована на С и С++
R1=R2 | R2 R1 - присвоения
R3.H=R7.L | R7.L R3H
R3=AO;
P4=R2;
R2.L=0×FEC3
Арифметическое устр-во допускает выполнение логич. операций с целыми, дробными, знаковыми и беззнаковыми данными.
R1=R2+R3 (S) – суммирование с записью в R1 с учётом насыщения
R2.H=R3.L+R4.H - без учёта насыщения
R2+=R3 | R2=R2+R3;
R2-=R4 | R2=R2+R4;
R2+=0×02 | R2=R2+02;
R3=(R2<<=0X02)
Для 16-разр. Данных в системе команд предусм. одинарные, двойные и тройные итерации. R1=R2+/R3
(R1.H=R2.H+R3.H; R1.L=R2.L-R3.L)
Команды безусловного перехода:
CALL (P3) CALL(PC+P1)
JUMP (P3) – абсолютный переход
JUMP (PC+P1) – относительный переход
Предпочтительнее использовать относительную адресацию.
IF cc JUMP addr cc – назв. флага при котором происх. переход
Флаговый регистр называется ASTAT
сс AZ(ноль); AC(перенос); AN(отрицание); AV(переполнение)
IF cc R4=R5
Если ноль: IF AZ R4=R5
Организация цикла:
addr:P5=#0×FFFF | задано число повторений цикла
L SETUP
(m0,m1)LCO=P5; | m0 – LTO LT1
SETUP
(m0,m1)LCO=P5; | m0 – LTO LT1
m0: A0+=R0*R1 | m1 – LBO LB1
m1:R1=A0 | #FFFFLCO LC1
В этом микропроцессоре для организации циклов исп. 3 вида регистров: LT, LB, LC
LT1 – хранит верхний адрес цикла
LB1 – хранит нижний адрес цикла
LC – количество повторений цикла
Чтобы задать цикл необходимо записать m0, m1 и т.д. Это выполн с помощью команды LSETUP
AO=0×00 P5=#0×FFFF
Подпрограмма выдержки времени:
P3=#0×FFA0 0E00
CALL (P3)
m0:R1-=0×FF
m2:R1-=0×01
IF AZ JUMP m1
JUMP m2
m1:R1=0×00
RET
Когда выполняется команда СALL в программном счётчике хранится адрес след. за ней команды.