

Моделирование разомкнутой эмс постоянного тока
Разомкнутая электромеханическая система (ЭМС) состоит из двигателя, редуктора и производственного механизма, напряжение прикладывается к якорной цепи и регулируется от внешнего источника питания.
Динамика разомкнутой ЭМС полностью описывается системой двух уравнений, первое из которых является основным уравнением двигателей постоянного тока и описывает переходные процессы в электрических цепях электродвигателя, а второе уравнение описывает механическую систему и построено на основании второго закона Ньютона для вращательного движения.
![]() (1)
(1)
![]() (2)
(2)
где
U- напряжение, приложенное к якорной
цепи; E - э.д.с. двигателя;
![]() - активное сопротивление, ток и
индуктивность якорной цепи;
- активное сопротивление, ток и
индуктивность якорной цепи;
![]() -
активный момент двигателя и момент
сопротивления, приведенный к валу
двигателя;
-
активный момент двигателя и момент
сопротивления, приведенный к валу
двигателя;
![]() -
круговая частота вращения якоря
двигателя, J
– момент инерции всех элементов системы,
приведенный к валу электродвигателя.
-
круговая частота вращения якоря
двигателя, J
– момент инерции всех элементов системы,
приведенный к валу электродвигателя.
Э.д.с. двигателя пропорциональна частоте вращения
![]() ,
(3)
,
(3)
где
c![]() -
конструктивный коэффициент двигателя,
Ф - магнитный поток возбуждения, n -
частота вращения в об/мин, c - коэффициент
пропорциональности.
-
конструктивный коэффициент двигателя,
Ф - магнитный поток возбуждения, n -
частота вращения в об/мин, c - коэффициент
пропорциональности.
Активный момент двигателя пропорционален току якоря
![]() ,
(4)
,
(4)
где
![]() -
конструктивный коэффициент.
-
конструктивный коэффициент.
Коэффициент
пропорциональности c
может быть определен из формулы
![]()
![]() ,
,
где
![]() -
номинальная круговая частота вращения,
-
номинальная круговая частота вращения,
![]() -
частота вращения в (об/мин),
-
частота вращения в (об/мин),
![]() -
номинальное напряжение,
-
номинальное напряжение,
![]() -
номинальный ток якоря.
-
номинальный ток якоря.
Иногда
в таблицах справочных данных отсутствует
одно из значений
![]() либо
либо
![]() ,
тогда недостающую величину можно оценить
из следующих соображений:
,
тогда недостающую величину можно оценить
из следующих соображений:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Если индуктивность якорной цепи не указана в технических характеристиках двигателя, то она может быть приближенно определена по формуле
![]()
где
![]() -
коэффициент, равный 0,6 для двигателей
без компенсационной обмотки и равный
0,25 для двигателей с компенсационной
обмоткой, p- число пар полюсов двигателя.
-
коэффициент, равный 0,6 для двигателей
без компенсационной обмотки и равный
0,25 для двигателей с компенсационной
обмоткой, p- число пар полюсов двигателя.
Напишем уравнения (1) и (2) таким образом, чтобы производные тока и скорости находились в левой части
![]() ;
;
![]() ;
или
;
или
![]() ;
;
![]() .
.
Моделирование
динамики электродвигателя с приведенными
нагрузками осуществляется по алгоритму,
представленному на рисунке 2. , где n
- счетчик циклов, z
- количество циклов, через которое
осуществляется печать,
![]() - предполагаемое время переходного
процесса,
- предполагаемое время переходного
процесса,
![]() -
сопротивление якорной цепи без пусковых
сопротивлений
-
сопротивление якорной цепи без пусковых
сопротивлений
![]() и
и
![]() ,
,
![]() ,
,
![]() .
Моменты времени отключения пусковых
сопротивлений
.
Моменты времени отключения пусковых
сопротивлений
![]() и
и
![]() необходимо подобрать таким образом,
чтобы пики тока якоря были приблизительно
одинаковыми, а величина пусковых
сопротивлений должна обеспечивать
кратность пускового тока 4…5.
необходимо подобрать таким образом,
чтобы пики тока якоря были приблизительно
одинаковыми, а величина пусковых
сопротивлений должна обеспечивать
кратность пускового тока 4…5.
Порядок построения регулировочной характеристики разомкнутой электромеханической системы и определения требуемого диапазона регулирования напряжения:
-Разработать программу моделирования разомкнутой ЭМС.
-Задать
значение напряжения, приложенного к
якорной цепи равное номинальному
напряжению двигателя и получить
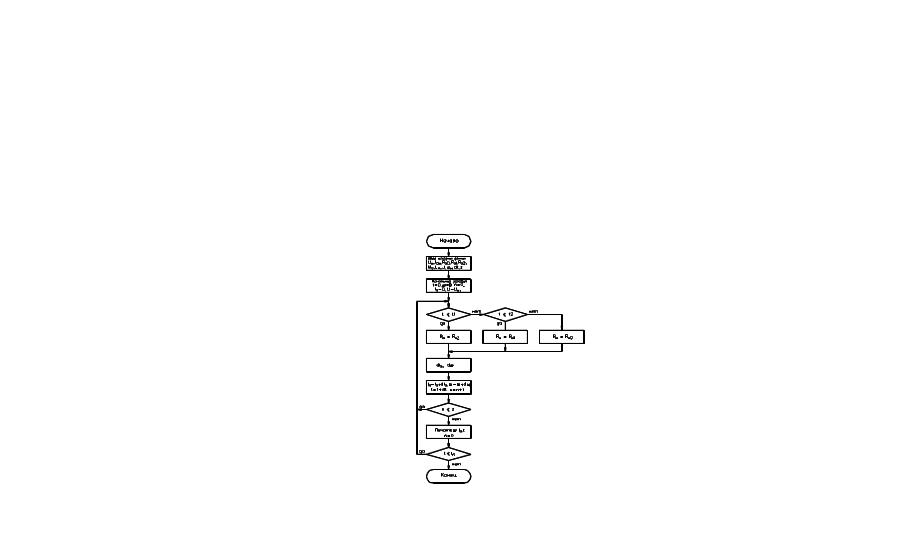 Рисунок
2 – Алгоритм моделирования разомкнутой
ЭМС постоянного тока
Рисунок
2 – Алгоритм моделирования разомкнутой
ЭМС постоянного тока
график переходного процесса. Убедиться в устойчивости этого переходного процесса.
-Задавая
6…8 значений напряжений U,
определить соответствующие значения
установившихся частот вращения
![]() ,
результаты занести в таблицу 1.
,
результаты занести в таблицу 1.
Таблица 1
U, B |
|
|
|
|
|
|
, рад/с |
|
|
|
|
|
|
-По
данным таблицы 1 построить график
зависимости установившейся частоты
вращения от напряжения
![]() .
.
-На
построенном графике на оси ординат
отложить значения минимальной
![]() и максимальной
и максимальной
![]() частот вращения двигателя, и определить
соответствующие им значения минимального
частот вращения двигателя, и определить
соответствующие им значения минимального
![]() и максимального напряжений
и максимального напряжений
![]() .
.
Порядок построения механической характеристики разомкнутой ЭМС и определение ее жесткости:
-В разработанной программе, задать напряжение равное номинальному напряжению двигателя.
-Задать
3…4 значения приведенного момента
сопротивления![]() и определить соответствующие значения
установившейся частоты вращения
.
Результаты моделирования занести в
таблицу 2.
и определить соответствующие значения
установившейся частоты вращения
.
Результаты моделирования занести в
таблицу 2.
Таблица 2
-
 ,
Нм
,
Нм, рад/с
-На
основании таблицы 2 построить график
зависимости
![]() для разомкнутой ЭМС.
для разомкнутой ЭМС.
-Определить
жесткость полученной механической
характеристики разомкнутой системы
по формуле
![]() ,
где
,
где
![]() - изменение частоты вращения, вызванное
изменением момента сопротивления
- изменение частоты вращения, вызванное
изменением момента сопротивления
![]() .
.