

Изменение частоты питающего напряжения f .

Если регулирование осуществляется только частотой питающего напряжения, то частота ХХ пропорционально возрастает, а нагрузочная способность уменьшается. Это происходит потому, что с увеличением частоты увеличивается индуктивное сопротивление статорных обмоток, следовательно ток в них уменьшается и уменьшается момент. Для сохранения нагрузочной способности двигателя при частотном регулировании необходимо пропорционально частоте регулировать и амплитуду напряжения.
Изменение числа пар полюсов р.
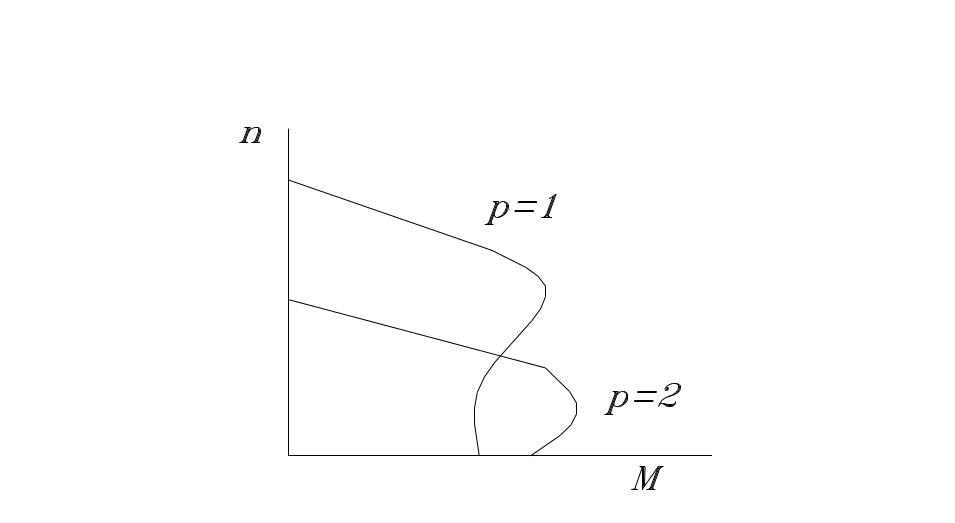
Число пар полюсов можно изменять в целое число раз, если конструктивно иметь N – е количество пар полюсов. При увеличении числа пар полюсов частота уменьшается, а нагрузочная способность увеличивается.
Регулирование скольжения s.
Скольжение можно регулировать за счет амплитуд приложенных напряжений.

ПУСКО-СИНХРОННЫЙ ДВИГАТЕЛЬ
При пуске АД возникает аналогичная проблема, как и при пуске ДПТ, но кратность пускового тока обычно составляет от 2 до 10.
Существуют 4 способа пуска:
Прямой пуск. Можно применять для АД мощностью до 1,5 кВт и зависит от параметров сети.
За счет введения добавочных сопротивлений. На время пуска последовательно с обмоткой статора подключают индуктивное сопротивление.

В начальный момент времени замыкается контакт К1, а после разгона АД контакт К2. Индуктивности L1-3 подбираются таким образом, чтобы кратность пускового тока не превышала 2,5. Для уменьшения тока в k – раз необходимо понизить напряжение в k – раз. Но момент АД уменьшится в k2 раз.
Достоинства: простота реализации.
Недостатки: снижение момента.
Пуск при пониженном напряжении.

Он осуществляется при помощи автотрансформатора. При снижении U в k – раз величина момента снижается в k – раз.
Достоинства: большие значения моментов.
Недостатки: значительная стоимость и сложная реализация пускового аппарата.
Пуск переключением со “звезды” на “треугольник”. Может использоваться только в том случае, если рабочая схема - “треугольник”. При этом пуске статорные обмотки включаются по схеме “звезда”. После разгона переключение на “треугольник”, где к каждой обмотке приложено

Достоинства: простота реализации.
Недостатки: невозможно использовать для АД, включенного по схеме “звезда”.
ТОРМОЖЕНИЕ АД
Существует три способа торможения:
Динамическое.

При динамическом торможении статорные обмотки отключаются от 3-х фазного напряжения и в две или в три фазы подается постоянное напряжение.
При подаче постоянного напряжения в АД формируется неподвижное в пространстве магнитное поле. Ротор по инерции вращается в этом поле, в результате чего в его короткозамкнутых обмотках возникает индуктивный ток, взаимодействие которого с магнитным потоком статора создает тормозной момент. Торможение осуществляется до нулевой скорости, но с уменьшением частоты вращения величина момента уменьшается.
При
динамическом торможении всегда
используется тормозное сопротивление
RT,
выполняемое функцию токоограничителя,
т.к. при постоянном токе индукционное
сопротивление XL=0,
а активное сопротивление обмоток мало,
поэтому ток необходимо ограничивать.
В качестве источника постоянного
напряжения обычно используется одна
из фаз переменного напряжения и
выпрямитель. При этом амплитуда
выпрямленного напряжения будет составлять
![]()
Торможение противовключением.
П ри
этом виде торможения у вращающегося по
инерции двигателя уменьшается направление
вращения магнитного поля. Для чего
необходимо изменить порядок подключения
любых двух фаз АД. При этом направление
момента АД изменяется на противоположное.
Если при нулевой скорости АД не отключить
от сети, то он начнет разгоняться в
противоположную сторону – произойдет
его реверсирование.
ри
этом виде торможения у вращающегося по
инерции двигателя уменьшается направление
вращения магнитного поля. Для чего
необходимо изменить порядок подключения
любых двух фаз АД. При этом направление
момента АД изменяется на противоположное.
Если при нулевой скорости АД не отключить
от сети, то он начнет разгоняться в
противоположную сторону – произойдет
его реверсирование.
Конденсаторное торможение.
При конденсаторном способе торможения параллельно к обмоткам подключают батарею конденсаторов непосредственно перед торможением, а во время торможения АД отключают от сети. Происходит разряд конденсаторов через обмотки статора.
Непосредственно перед торможением замыкается контакт К2, а затем размыкается К1. При этом происходит разряд конденсаторов через обмотки АД, что создает неподвижное магнитное поле.

Если сравнивать динамическое торможение и торможение противовключением, то наиболее эффективным является торможение противовключением. Но при нем за счет инертности регулировочной аппаратуры возможно многократное реверсирование АД перед остановкой.
Если сравнивать динамическое торможение и конденсаторное торможение, то наиболее эффективным является динамическое, т.к. создаваемый магнитный поток при этом постоянен, а при конденсаторном убывает по мере разряда конденсаторов.
РАБОТА АД В РЕЖИМЕ НИЗКИХ СКОРОСТЕЙ

При позиционировании, обычно, требуется наличие 2-х скоростей: высокой, на которой происходит вывод в некоторую область позиционирования и малой (ползучей) скорости, непосредственно, для позиционирования.
Режим ползучих скоростей может быть получен наложением двух режимов: двигательного и динамического торможения.
При нормальной работе замыкается К1 – быстрая скорость. Для перехода на ползучую скорость контакты К1 размыкаются и замыкаются К2. Происходит динамическое торможение АД. При достижении некоторой частоты вращения дополнительно замыкаются К3, в результате происходит наложение двух режимов. При этом АД начинает работать на малой частоте вращения, которая составляет сотые доли от быстрой скорости. Этот режим является кратковременным, т.к. при этом происходит нагрев двигателя.
ДВУХФАЗНЫЕ АД
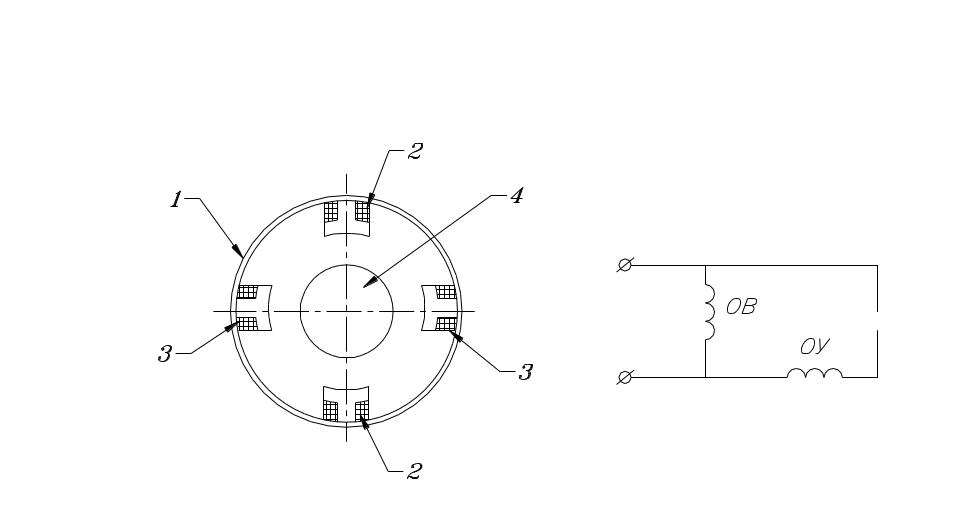

В двухфазных АД статические обмотки выполняются на противоположных полюсах, расположенных под прямым углом. При этом одну из обмоток (ОВ) подключают непосредственно к источнику однофазного переменного напряжения, а вторичную обмотку управления (ОУ) через конденсатор. Такие двигатели часто называют конденсаторными.
Такие двигатели позволяют регулировать частоту вращения 3-мя способами:
за счет регулирования частоты и амплитуды напряжения.
амплитудный (регулирование амплитуды напряжения в ОВ и ОУ).
фазовое регулирование (регулируется фазовый сдвиг между токами в ОВ и ОУ).