

Примеры простейших сау
Техническую систему можно считать САУ, если она удовлетворяет следующей функциональной схеме.
Система автоматического управления – техническая система, работающая без участия человека.
При этом обязательно должна существовать цель управления.
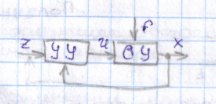
Блоки:
УУ – устройство управления;
ОУ – объект управления.
Сигналы:
z – задающее воздействие;
u – управляющее воздействие(управление);
х – регулируемый выход;
f – возмущающее воздействие.
1.

Объект управления – резервуар жидкости.
Устройство управления – поплавковая система (поплавок + игольчатый клапан + крепление)
Сигналы:
х – регулируемый выход – уровень жидкости в баке;
z – задающее воздействие – длина игольчатого клапана;
u – управление – поступающая жидкость;
f – возмущение – отбираемая жидкость.
Функция выхода имеет вид:
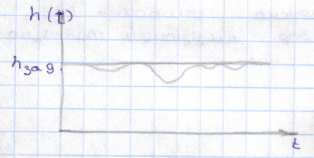
Цель управления: поддержание уровня жидкости на требуемом значении.
Вывод: данная техническая система является системой автоматического управления.
2.
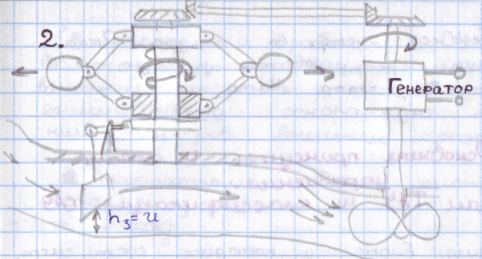
Объект управления: турбина (генератор + турбина).
Устройство управления: центробежный регулятор в сборке с заслонкой.
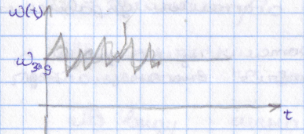
Цель управления: поддержение скорости вращения вала турбины (генератора) на заданном значении (уровне).
Сигналы:
х – регулируемый выход: частота вращения вала генератора;
z – задающее воздействие: масса шаров и длина шарниров;
f – возмущение: нагрузка на валу привода (генератора, турбины), например, электрической..
Для плавности используются: пружины Демфера.
Данная техническая система САУ.
Центробежное устройство с заслонкой позволяющее регулировать угловую скорость. – Регулятор Уата.
Основные принципы и схемы управления. Задачи тау и классификация сау
Рассмотрим следующие блоки из которых состоит система уравнений.
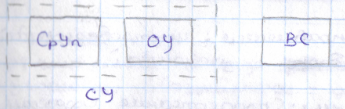
СрУп – средство управления;
ВС – внешняя среда;
ОУ – объект управления;
СУ – система управления как совокупность СрУп и ОУ.
Системы управления могут быть построены по 2-м основным принципам работы.
1.Работающий по разомкнутому циклу.
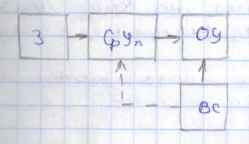 З
– задающее устройство осуществляющее
отдельное формирование программы
работы системы управления.
З
– задающее устройство осуществляющее
отдельное формирование программы
работы системы управления.
Состав СрУп имеются измерители и компенсаторы действия внешней среды.
Программа работы СУ может включать: программную компенсацию внешней среды, а также компенсацию внешней среды основанную на измерении параметров внешней среды.
Недостатком таких систем является то, что вход системы не контролируют её выход.
2.Работающий по замкнотому циклу.
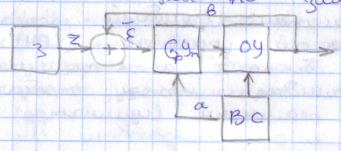
ε – ошибка в САУ (ошибка исполнения);
СрУп – средства управления, выражают воздействие на объект ОУ по ошибке исполнения ε.
Управление осуществляется с непрерывным контролем результата.
В случае наличия связи α возможно управление с дополнительной компенсацией внешней среды.
Связь в называется главной обратной связью ( отрицательная связь).
+ - сумматор сигнала.
Практически все современные САУ работают по замкнутому циклу.
По виду сигналов задающие устройства “z” , различают 3 главных типа систем управления:
1)системы собственного регулирования (системы стабилизации) z = const.
2)системы программного регулирования (z – заданная функция от времени).
3)следящие системы (z - заранее неизвестная функция времени).
Следящая система (наиболее распространенная), в составе средств управления(СРУ) нет непосредственно блока z, а есть измеритель ошибки между требуемым сигналом и реальным(сумматор).
Система управления может представлять собой совокупность сложных технологических устройств с четко разделенными функциями.
Вместе с тем могут быть системы управления устроеннные весьма примитивно, так , что СрУп в одном устройстве объеденяет все функции, поэтому продолжая классификацию будем говорить о системах:
1.Непрямого регулирования.
2.Прямого регулирования.
Например: регуляторы Уата и Ползунова относятся к системам прямого регулирования, а электродвигатель промышленная раота к системам непрямого регулирования.
В общем случае системы непрямого регулирования могут быть описаны следующей функциональной схемой.
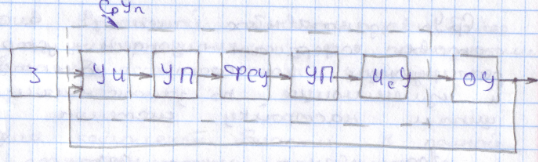
УИ – устройство измерений;
УП – устройство преобразования;
ФСУ – устройство формировани сигнала управления;
ИсУ – исполнительное устройство.
УИ измеряет фактические значения регулируемых перемещаемых объектов управления (гироскоп, тахометров…).
УП необходимо для сопряжения выхода измерительного устройства с последующими устройствами.
ФСУ формирует требуемый закон управления.
ИсУ приводит в движение ограничение управление объекта.
Так как реальная система САУ требует для своего функцирнального определения настройки параметров, то в сложных условиях эксплуатации может возникать необходимость перенастройки системы, поэтому различают системы:
1.С неизменной настройкой (обычные).
2.С изменяющейся настройкой а зависимости от режимов эксплуатации и свойств внешней среды.( адаптивные ).
СрУп адаптивных систем в своём составе содержат дополнительные устройства, реагирующие на составляющие объекта ОУ и ВС и изменяющие по заложенным принципам настройку системы.
Адаптивные системы:
1)экстремального регулирования;
2)самонастраивающиеся;
3)самоорганизующие.
Классификация по математическим моделям
1)линейные системы;
2)нелинейные системы;
3)непрерывные;
4)дискретные;
5)вероятностные (стохастические);
6)с сосредоточенными параметрами;
7)с распределенными параметрами;
8)непрерывно-дискретные.