

Основные задачи тау
1)Исходная задача: построение математической модели САУ.
Типы моделей:
- во временной области : адекватным аппаратом является дифференциальные, (для непрерывных САУ); и конечно, разностные (для дискретных САУ) уравнения.
;
- в комплексной области: средством является функция комплексного переменного (передаточная функция)..
Модели временной области являются более общими, универсальными, то есть пригодными для всех классов систем указанных выше.
Модели комплексной области в полной мере годятся лишь для класса линейных систем.
2)Исследование устойчивости(разработка методов анализа устойчивости).
3)Исследование точности функционирования систем.
4)Исследование качества переходных процессов систем.
К основным прямым показателям качества:
- время регулирования;
- перерегулирование.
Стандартный переходный процес:
Δ = [0.03÷0.05]hуст
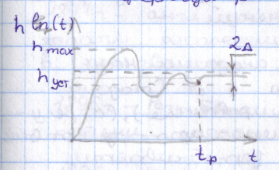
tр – время регулирования, момент времени, когда входит в коридор.
Перерегулирование
σ% = (hmax-hуст)/hуст·100%
tр характерезует быстродействие САУ.
σ характеризует колебательные свойства САУ.
Для хороших систем перерегулирования не должно превышать 35%.
5)Разработка методов анализа и синтеза САУ систем различных классов.
К методам синтеза относятся:
- метод ЛАЧХ – Солодовского;
- корневого годографа и т.д.
Становление тау. Краткая историческая справка
1765 г. – Барнаульский завод, инженер Ползунов сконструировал поплавковый регулятор уровня воды в котле.
1784 г. – был изобретен центробежный регулятор (Дм. Уат) скорости.
1868 г. – Дж. Максвел написал ряд работ об устойчивости уравнений.
1878 г. – В парижской академии наук представлен ряд работ А.Стодола (об общей теории регулирования) , (о регуляторах прямого, непрямого действия и др.), посвященные устойчивости работы гидравлической турбины.
В это время ученые осуществили системный подход к общей задаче автоматического регулирования.
Рассматривали взаимодействие паровой машины и регулятора, построили математическую модель такой САУ, в виде системы дифференциальных уравнений, или эквивалентного уравнения 2-го – 3-го порядка относительно одной переменной.
а0y”’(t) + a1y”(t) + a2y’(t) + a3y(t) = f(t)
В рассмотрение было введено характерестическое уравнение:
a0λ3 +a1λ2 + a2λ + a3 = 0
с набором решений: е λ1t, е λ2t, е λ3t
Производимость распределения корней в комплексной плоскости ( характеристическое уравнение ).Это распердиление, русский ученый Вышнеградский связал с параметрами системы и ввел диаграмму качества системы (колебательности, затухания и т.п.).
1877 г. – английский ученый Рауз полностью решил задачу распределения корней уравнений в произвольной степени.
1895 г. – Разработал лаконичный алгоритм решения задачи (алгебраический метод).
1895 г. – немецкий математик Раус Гурвиц установил свой алгоритм ( отличны от алгоритма Рауса определение всех правых корней алгебраических уравнений; и необходимые и достаточные условия устойчивости системы) с помощью определителей Гурвица.
1892 г. – русский математик Лягунов представил общий фундаментальный подход к проблеме устойчивости.
Разработал два метода устойчивости, для линейных и нелинейных САУ.
В ХХ веке первые 3 десятилетия ТАУ развивалось только в деталях, однако в это время щло бурное развитие техники ( радио, электричество, энергетика и т.п.).
Потребность в автоматизации управления возрастала, так как возрастала сложность объектов управления.
В 30-е годы ХХ века как альтернатива алгебраическим, появились частотные методы анализа устойчивости САУ (критерии) к ним относятся:
- критерии Найквиста 1932 г.;
- Михайлова 1936 г .
Залаживаются основные теории случайных процессов (Калногоров, Винер) и теории нелинейных систем (Боголюбов,Крылов).
К началу 50-х годов закончился классический период становления и развития ТАУ. В промышленности, технологии, технике, реализуются новые достижения науки.Возникает необходимости оптимизации систем управления, в частности, космических.
1945-52 гг. – возникает теория оптимального управления (А.А.Фельдбраун,Понтрялин).
В 60-е годы были созданы теории оптимальной фильтрации и оптимальногго линейно-квадратического и стохастического уравнения.
Современное ТАУ развтивает теорию многомерных систем ( сложные объекты управления со многими регулируемыми координатами), теорию импульсных и дискретных систе, теорию цифрового управления, теорию адаптивных систем.