§ 77. Аналитический метод стереофотограмметрической обработки снимков
Для решения топографических задач по снимкам наземной съемки используют в основном два метода: аналитический и универсальный. В аналитическом методе измерение координат точек снимков и продольных параллаксов производят на стереокомпараторах, описание которых дано в гл. 6.
После этого производят учет поправок за элементы внутреннего и внешнего ориентирования снимков, которые в первом случае определяют по формулам:
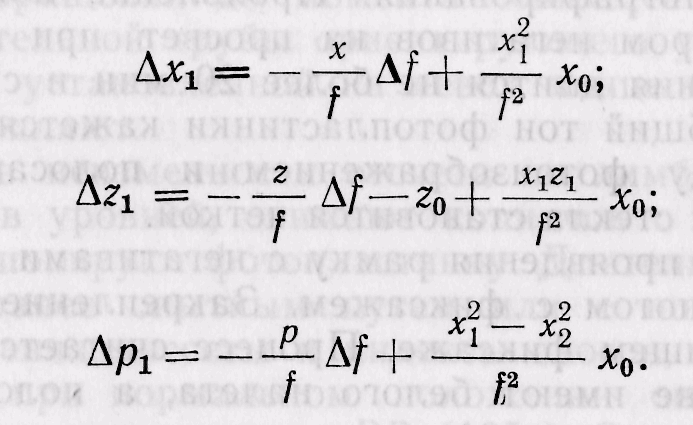
Поправка Δf = f´—f возникает из-за неприлегания фотопластинки к плоскости прикладной рамки фотокамеры. Значение f´ вычисляют по формуле f´=l´f/l, где l´ — расстояние между противоположными координатными метками на снимке, а l — на камере.
Поправки за элементы внешнего ориентирования определяют по формулам:
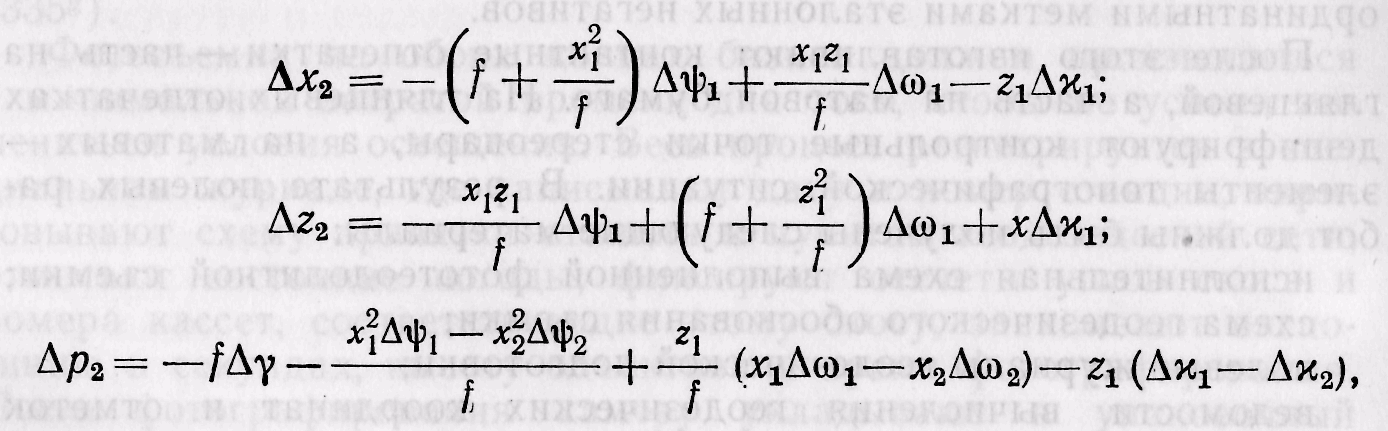
которые получаются путем преобразования формул (251).
Вычисление пространственных координат точек объекта сначала производят в фотограмметрической системе в зависимости от случаев съемки по формулам (268), (269), (270), (271), а затем, если это необходимо, их перевычисляют в геодезическую систему координат, используя для этого формулы (273).
Аналитический метод применяют тогда, когда требуется определить с максимальной точностью небольшое число точек. Вычисления, как правило, производят с помощью микрокалькуляторов.
§ 78 Универсальный метод стереофотограмметрической обработки снимков
Универсальный метод позволяет решать фотограмметрическую пространственную засечку без предварительного измерения координат и параллаксов стереопары снимков. При этом контуры и горизонтали в процессе создания топографических карт получаются путем непрерывного вычерчивания их на планшете. Кроме того, на планшете можно получить плановое и высотное положение отдельных точек местности.
Для обработки наземных снимков могут быть использованы универсальные стереофотограмметрические приборы, созданные для обработки аэрофотоснимков, если они учитывают особенности системы координат наземной съемки. К таким приборам относятся: стереопланиграф и стереометрограф Народного предприятия «Карл Цейс Йена» (ГДР) или автографы фирмы «Вильд» (Швейцария). Однако в основном эти снимки обрабатываются на специально созданных для этих целей приборах — стереоавтографе 1318 и технокарте Народного предприятия «Карл Цейс Йена» (ГДР).
Эти приборы относятся к приборам с расчлененной механической засечкой. Решение осуществляется двумя плоскими механизмами, лежащими во взаимно параллельных плоскостях, связь между которыми осуществляется в момент стереоскопического наведения измерительной марки на точку стереомодели.
Плановая засечка решается с помощью параллелограмма Орель— Цейсса, что позволяет сохранить расстояние между двумя центрами проектирования постоянным, не зависящим от базиса фотографирования. Принципиальная схема механизмов плановой и высотной засечек стереоавтографа 1318 Народного предприятия «Карл Цейс Йена» (ГДР) показана на рис. 106. Эти механизмы решают уравнения, определяющие пространственные координаты точек местности X, У, Z в фотограмметрической системе координат в соответствии с нормальным, равноотклоненным и конвергентным случаями съемки с горизонтально расположенными оптическими осями, обусловленные формулами (268), (269) и (270).
Механизм плановой засечки состоит: из двух плоских линеек LX1 и LX2 вращающихся в горизонтальной плоскости вокруг точек I и II; мостика отстояний МО; каретки отстояний КО; кареток снимков КX1 и КX2. Длинные плечи этих линеек с помощью ножничных шарниров N1 и N2 соединены с кареткой отстояний, которая может перемещаться по оси XX прибора, установленной на мостике отстояний. Сам мостик отстояний может перемещаться по оси Y. Шарнир N1 связан с кареткой отстояний жестко, а шарнир N2 — с базисным суппортом bх и bу.
Короткие плечи линеек через шарниры n1´ и п2´ , установленные на суппортах фокусных расстояний, связаны с каретками снимков КХ1 и КX2 . Поворот линеек вызывает перемещение кареток снимков по направляющей хх, параллельной оси XX. Рабочие ребра длинного и короткого плеч линейки LX1 всегда находятся на прямой линии, в то время как плечи линейки LX2 можно устанавливать под углом друг к другу в пределах от +5 до —2,5g, что позволяет на этом приборе производить обработку снимков, полученных при конвергентном случае съемки.
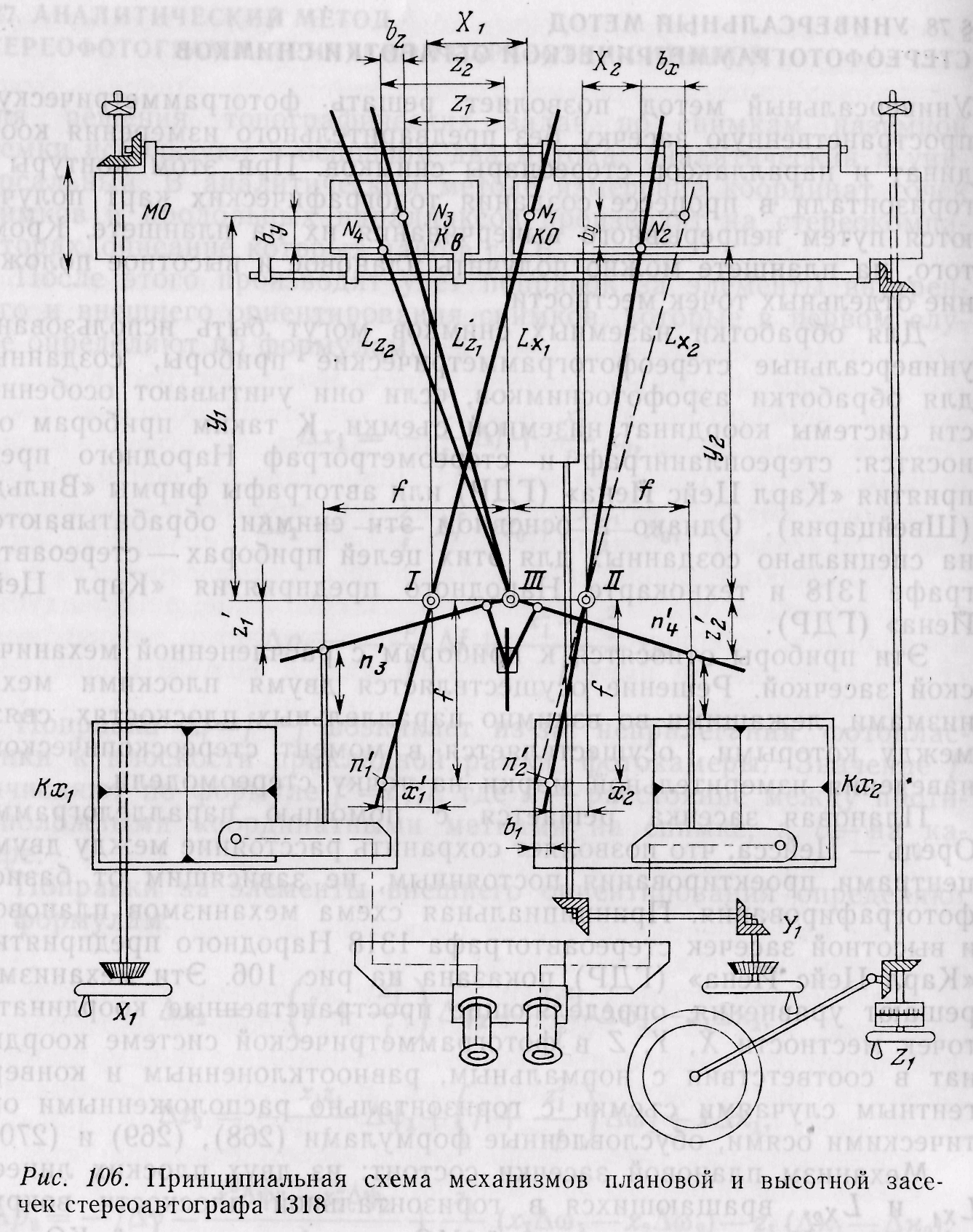
Такое устройство называется конвергентным. Если на каретках КX1 и КX2 установить снимки стереопары, а на суппортах фокусных расстояний значение f снимков и на базисных суппортах значения bх и bv в масштабе модели, то с помощью штурвалов X, Y, Z можно навести измерительные марки m1 и m2 на точки снимков n1 и n2, т. е. осуществить стереоскопическое наблюдение точки модели. Тогда ролик N1 определит плановое положение точки местности в системе фотограмметрических координат с началом в точке I в масштабе модели М.
Механизм высотной засечки состоит: из мостика высот MB; каретки высот KB; линейки высот LZ1 и подвижной части бинокулярного микроскопа. Линейка LZ1 вращается вокруг центра III. Длинное плечо этой линейки связано с кареткой высот с помощью шарнира N3 который вместе с кареткой высот перемещается по оси ZZ. Мостик высот находится выше мостика отстояний и параллелен ему. Оба мостика перемещаются по оси Y. Таким образом, расстояния IN1 — IIIN3=Y.
Так как на приборе оси XX и ZZ параллельны, а на снимке они взаимно перпендикулярны, то короткое плечо линейки LZ повернуто на угол 90° и связано с шарниром n3', установленным на суппорте левой подвижной части бинокулярного микроскопа. В момент, когда линейка LZ1 будет параллельна оси Y прибора, измерительная марка т1 окажется совмещенной с осью хх левого снимка. При стереоскопическом наведении марки на точку модели шарнир N3 сместится относительно исходного на величину
![]() ,
т.
е. определит высоту наблюдаемой точки,
которую можно отсчитать в метрах по
специальному счетчику высот Z1.
На
оси III
укреплена
вторая линейка высот LZ2.
Длинное
ее плечо с помощью суппортов bZ
и
by
связано
с шарниром N4.
Короткое
плечо этой линейки через суппорт
фокусного расстояния f
правой подвижной части бинокулярного
микроскопа связано с шарниром n4´.
Такое устройство позволяет при
стереоскопическом рассматривании
снимков автоматически устранять
поперечный параллакс q,
который
является функцией превышения концов
съемочного базиса, угла отклонения
и конвергенции, определяемый зависимостью
,
т.
е. определит высоту наблюдаемой точки,
которую можно отсчитать в метрах по
специальному счетчику высот Z1.
На
оси III
укреплена
вторая линейка высот LZ2.
Длинное
ее плечо с помощью суппортов bZ
и
by
связано
с шарниром N4.
Короткое
плечо этой линейки через суппорт
фокусного расстояния f
правой подвижной части бинокулярного
микроскопа связано с шарниром n4´.
Такое устройство позволяет при
стереоскопическом рассматривании
снимков автоматически устранять
поперечный параллакс q,
который
является функцией превышения концов
съемочного базиса, угла отклонения
и конвергенции, определяемый зависимостью

Стереоавтограф 1318 (ГДР) (рис. 107) конструктивно выполнен из нескольких функциональных блоков: станины 5, мостика отстояний 6, кареток снимков 1, мостика линеек 4, наблюдательной системы 2 и координатографа 3.
Станина прибора установлена на трех ножках с подъемными винтами. На ней установлена направляющая оси Y и перпендикулярно к ней цилиндрическая направляющая кареток снимков. На передней панели станины размещены: неподвижные элементы наблюдательной системы; штурвалы ведущих винтов Х1, Y1, Z1 (см. рис. 106) со счетчиками координат, реостаты осветительной системы снимков и марок.

Мостик отстояний выполнен в виде двухэтажной Т-образной детали с салазкой. В нижней части установлена направляющая оси XX, а в верхней части — направляющая оси ZZ. По ним перемещаются каретки отстояний и высот, несущие на себе ножничные шарниры N1, N3 и базисные суппорты плановой и высотной засечек с ножничными шарнирами N2 и N4.
Каретки снимков перемещаются по цилиндрической направляющей. На них установлены суппорты фокусных расстояний плановых линеек с шарнирами n1´ и п2´ .
Мостик линеек крепится к станине выше направляющей Y. Он несет на себе: оси вращения плановых I, II и высотных линеек III; направляющие осей z1z1 и z2z2 подвижных частей бинокулярного микроскопа с повторительными системами для установки высоты горизонта и суппорта фокусных расстояний с ножничными шарнирами п1´ и п2´.
Наблюдательная система состоит из двух частей — неподвижной и подвижной. Ход лучей между ними телескопический. Она оборудована цветными светящимися марками, диоптрийными кольцами и приспособлением для изменения глазного базиса.
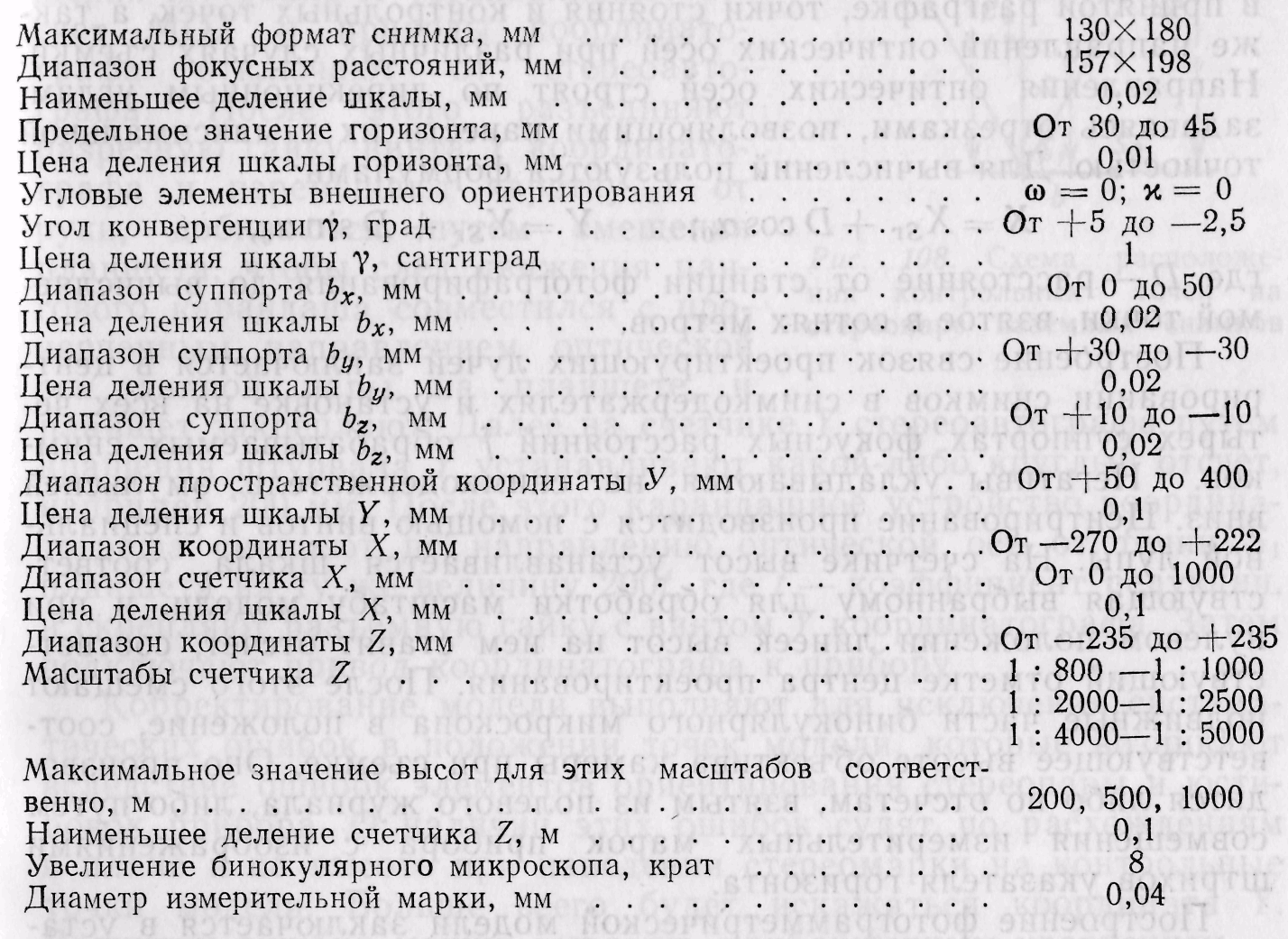
Координатограф служит для графических построений в заданном масштабе плана. Его координатные винты связаны с приводами стереоавтографа механическими карданными (стереоавтограф 1318) или сельсинными моторами (стереоавтограф 1318EL) через редуктор, который позволяет установить необходимый коэффициент редукции с помощью набора сменных шестерен. Чертежное устройство оборудовано соленоидом для управления цанговым карандашом или лупой — для управления с помощью ножной педали. Ниже приведены основные характеристики прибора: