

§ 73. Формулы связи между геодезическими и фотограмметрическими координатами
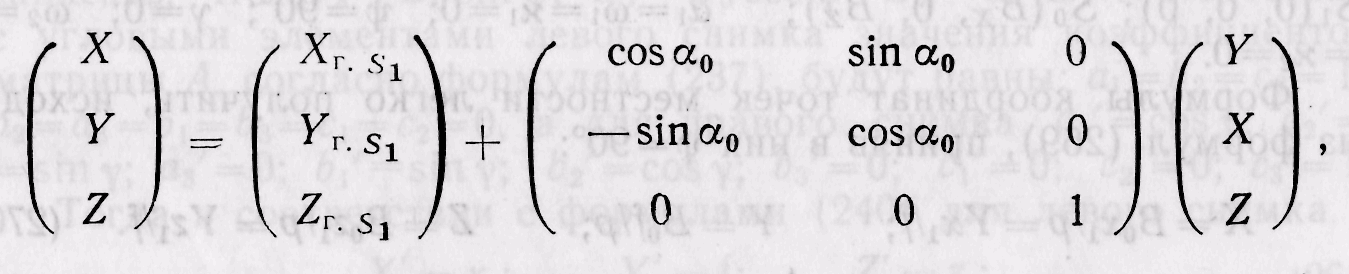
Выведенные ранее формулы соотношения координат точек местности и снимка были получены в пространственной фотограмметрической системе координат. Для перехода к какой-либо другой системе пространственных координат, например к системе Гаусса—Крюгера, следует воспользоваться общей матричной зависимостью:
![]()
где Rг — матрица искомых геодезических координат; Rг.s1— матрица геодезических координат левого конца базиса; t—масштабный множитель; Аг—матрица преобразования систем координат; R — матрица фотограмметрических координат. Учитывая, что обе системы координат горизонтальны и вращение систем происходит на угол α0 (дирекционный угол направления оптической оси в левом конце базиса), принимая t=1, получим выражение (272) в координатной форме:
которое содержит три координатных уравнения вида
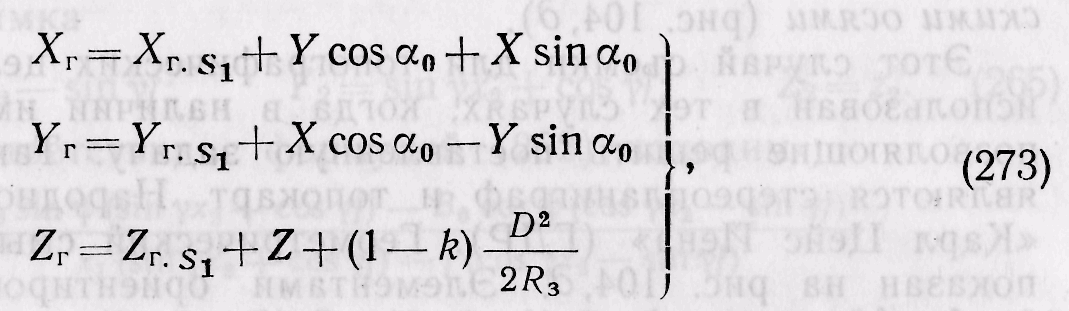
где
![]() -поправка
в высоты точек за кривизну Земли и
рефракцию. Обратный переход осуществляется
по формуле
-поправка
в высоты точек за кривизну Земли и
рефракцию. Обратный переход осуществляется
по формуле
![]()
§ 74. Точность определения координат точек местности при наземной фототопографической съемке
Точность
определения X,
Y,
Z
прежде
всего зависит от самой съемки, т. е. от
размеров базисов фотографирования, от
отстояния определяемых точек, от
фокусного расстояния, от углов отклонения
и конвергенции. Кроме того, зависит от
точности определения Во,
f,
xo,
zo,
измерения х1,
Z1
и
р,
а
также от ошибок установки фотокамеры
в требуемое положение, от ошибок скоса
Δψ, конвергенции Δγ,
наклона
Δω и крена
![]() .
.
Условия съемки можно рассчитать заранее и таким образом сделать сопутствующие им ошибки минимальными. В этом случае нас будут интересовать вторая и третья группы источников ошибок. Для выявления их влияния на координаты X, Y, Z необходимо найти полные дифференциалы этих функций, которые согласно формулам (269) определяются следующими зависимостями:
![]()
где
![]()
Сначала найдем
![]()
Здесь влияние второго и третьего членов, по сравнению с первым мало, поэтому

Значение dZ по аналогии с dX можно определить по формуле

Для определения dУ продифференцируем функцию У выражения (275), получим
![]()
Подставим в выражение (280) значение p=Bof ´/Y, получим
![]()
Анализируя уравнение (281), следует отметить, что величина второго члена зависит от относительной ошибки базиса фотографирования, а величина третьего члена — от относительной ошибки определения фокусного расстояния фотокамеры. На практике базис легко можно измерить с относительной ошибкой порядка 1/2000, а фокусное расстояние — с ошибкой 1/10 000. Таким образом, этими членами можно пренебречь. Учитывая сказанное и переходя к средним квадратическим ошибкам определения координат точек местности для равноотклоненного случая съемки, получим

Для нормального случая съемки
![]()
Сравнивая между собой ошибки в координатах для основных случаев съемки, мы видим, что ошибки в случае съемки с отклоненными осями возрастают в 1 /sinψ раз. Таким образом, съемка с нормальными осями точнее. Разделив тх и mZ на mY, получим
![]()
Таким образом, ошибки в координатах X и Z будут меньше ошибки в координате Y во столько раз, во сколько x1 и z1 меньше f. Например, при х1 = 80 мм, z1=60 мм и f= 200 мм получим

Формулы (282) и (283) показывают, что ошибки в координатах зависят главным образом от ошибки параллакса тр. В свою очередь, на измерения параллакса влияют следующие ошибки:
1. Ошибки наведения стереомарки на точку модели при измерениях на стереокомпараторе. При 10-кратном увеличении mРH = 3,6 мкм.
2. Ошибки отсчета по шкале параллаксов. Например, при измерениях на стереокомпараторе 1818 Народного предприятия «Карл Цейс Йена» (ГДР) mро = 2,5 мкм.
3. Ошибки определения элементов внутреннего ориентирования

При x1 = 80 мм, х2 = 70 мм, Δf = 0,025 мм, хо = О,О6 мм, f = 200 мм тРв о =3 мкм.
4. Ошибки неплотного прилегания фотопластинки к плоскости прикладной рамки в момент фотографирования тРпp =5 мкм.
5. Ошибки в установке угловых элементов ориентирования Δγ=Δ(ψ1 —ψ2), Δψ, Δω, . Их суммарное влияние можно рассчитать по формуле

При установке этих элементов с ошибками не грубее Δγ = 5", Δψ = 2', Δω= 10", = 10" получим:
![]()
Таким образом, квадрат средней ошибки определения параллакса в зависимости от влияния действующих источников погрешностей равен
![]()
откуда, с учетом значений ошибок, получим mр=12 мкм.
Пользуясь конкретным примером:
Y=2000 м, В0 = 200 м, f = 200 мм, x1 = 80 мм, z1 = 60 мм, sin ψ = 0,85, mp = 0,012 мм, подсчитаем ожидаемые ошибки в координатах X, Y, Z по формулам (282) и (283): mx = 0,5 м, mz = 0,4 м, mу = 1,4 м (для случая съемки с отклоненными лучами); тх = 0,4 м, mz = 0,3 м, my=1,2 м (для нормального случая съемки).
Указанная точность соответствует аналитическому способу решения задачи.