

§ 71. Основные формулы для одиночного наземного снимка
При выводе основных зависимостей наземной съемки, так же как и при воздушной съемке, исходят из предположения, что фотографические изображения являются центральными проекциями объекта. Это позволяет для описания математических моделей использовать одни и те же уравнения коллинеарности и компланарности проектирующих лучей. Первое условие используется для построения модели по одиночным снимкам, а совместные условия— для построения модели по паре снимков.
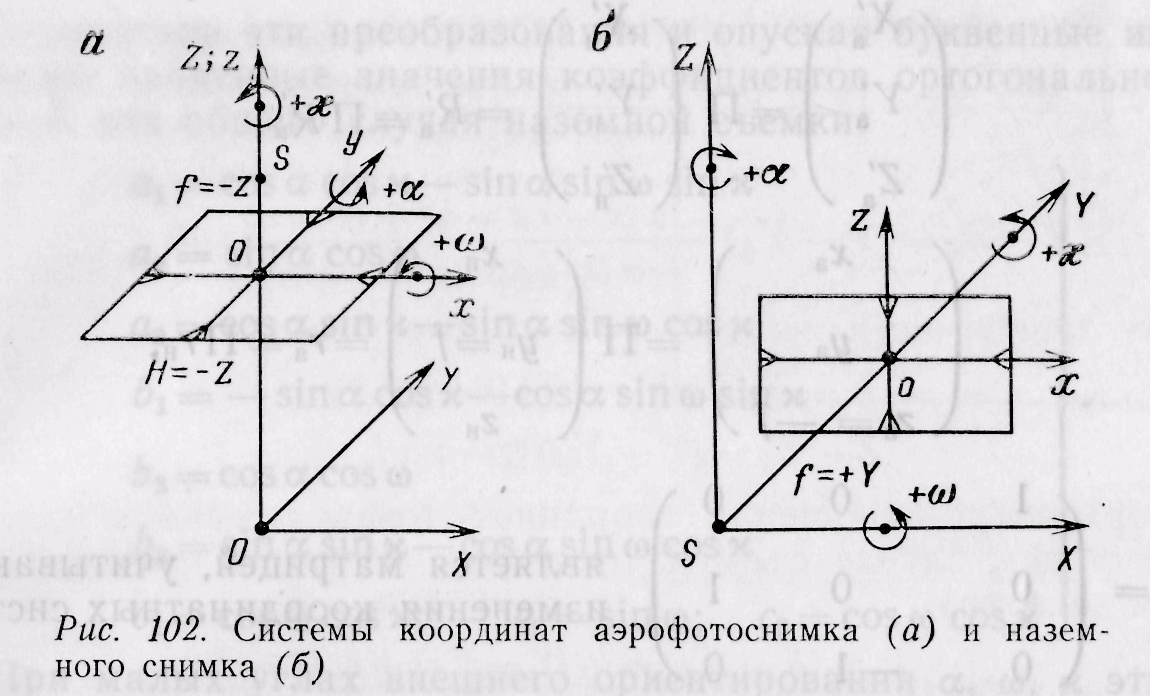
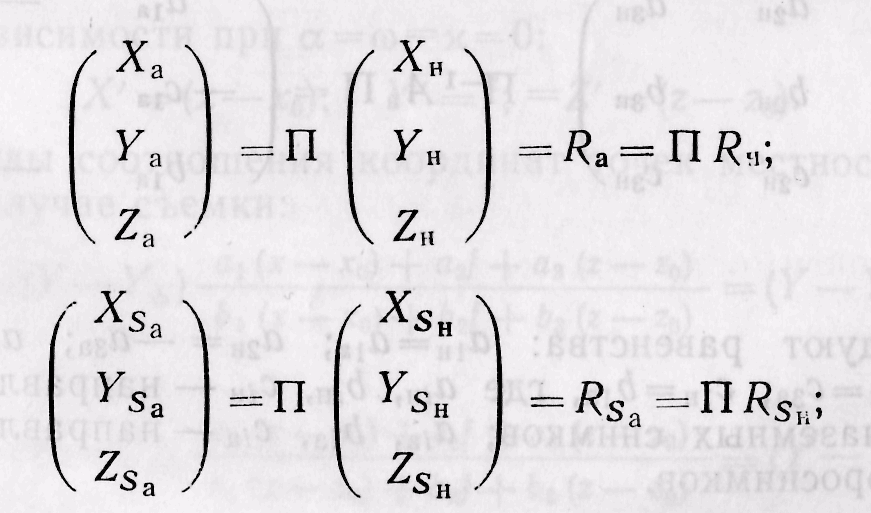
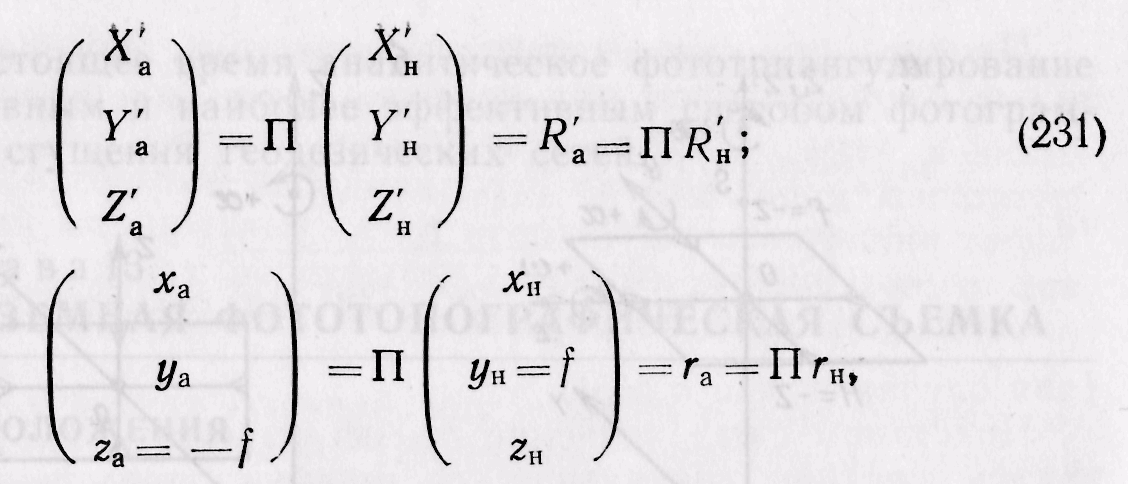
Основные формулы для наземной съемки могут быть получены из соответствующих формул аэрофотосъемки, выведенных в гл. 3, 7 и 8, с учетом разницы в системах координат (рис. 102). Например, для аэрофотосъемки система координат объекта XaZaYa меняется на систему координат XHYHZH. Аналогично это происходит и с координатными системами аэрофотоснимка и наземного снимка. Вместо координат ха, уа берутся координаты xHzH. Указанные изменения позволяют записать следующие координатные равенства:
где
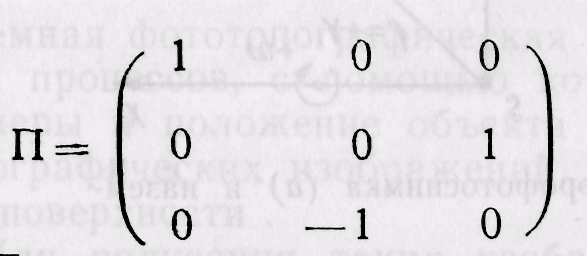 является
матрицей, учитывающей изменение
координатных систем.
является
матрицей, учитывающей изменение
координатных систем.
Для определения матрицы направляющих косинусов наземных снимков воспользуемся формулами преобразования координат точек аэроснимка, выведенных в гл. 3,
![]()
где Аа — матрица преобразования координат точек аэроснимка, коэффициенты которой соответствуют формуле (20). Учитывая в ней равенства (231), будем иметь
![]()
Умножая обе стороны этого выражения на П-1, получим
![]()
Это выражение можно представить в виде
![]()
где Ан = П-1АаП.
Перемножая матрицы П-1, Аа и П, получим
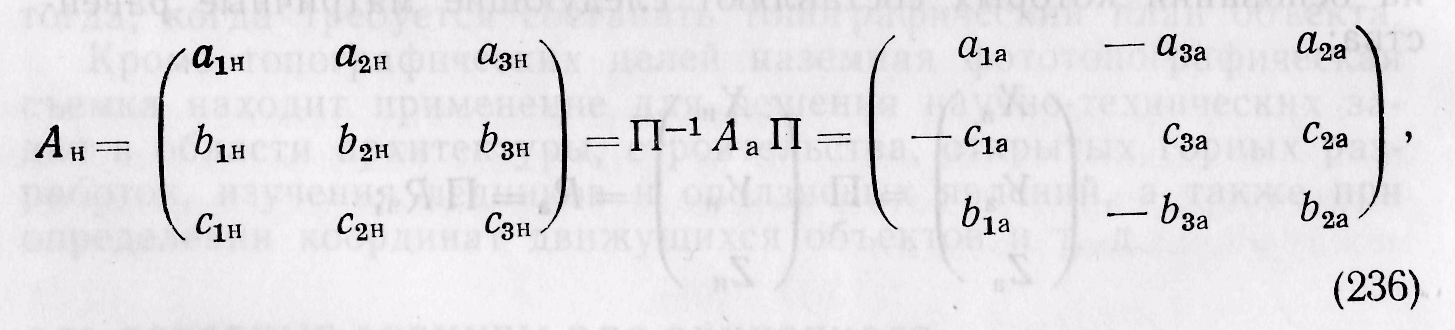
откуда следуют равенства: a1H=a1a; a2н=—a3а, a3н=a2а; b1H = = — с1а; b2н = с3а; clH = bla, где aiн, biн, сiн — направляющие косинусы для наземных снимков; aiа, bia, cia — направляющие косинусы для аэроснимков.
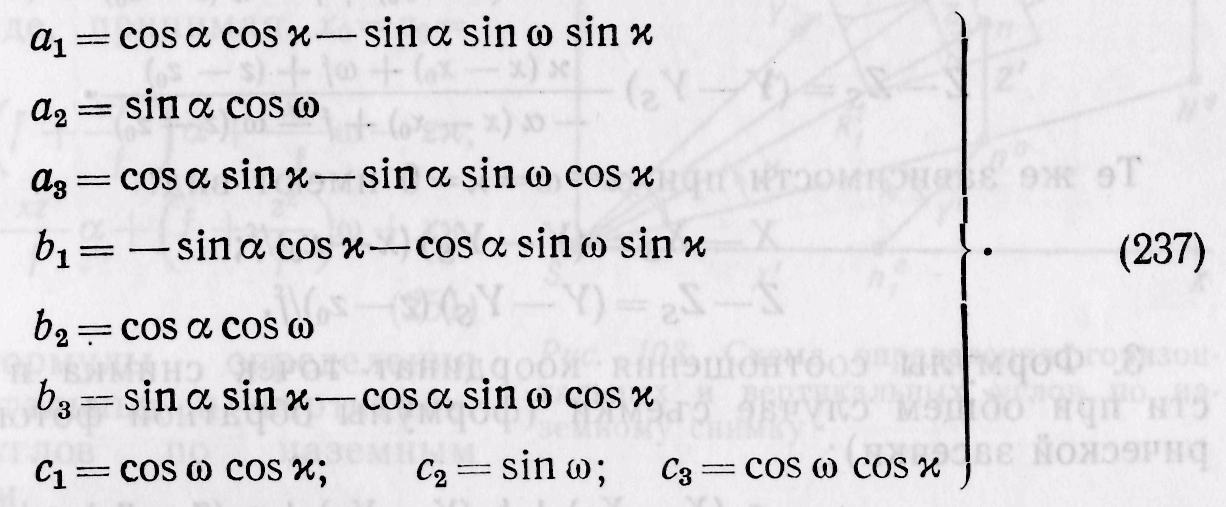
Осуществив эти преобразования и опуская буквенные индексы, запишем найденные значения коэффициентов ортогональной матрицы А для общего случая наземной съемки:
При малых углах внешнего ориентирования α, ω, эти коэффициенты будут равны:
![]()
При ω = α = = 0 матрица А становится единичной, т. е.
![]()
На основании изложенного запишем основные зависимости для одиночного наземного снимка.
1.Формулы преобразования координат точек снимка в двух различных системах координат, имеющих общее начало при общем случае съемки:

Те же зависимости при малых значениях α, ω, :

Те же зависимости при α= ω= = 0:
![]()
2.Формулы соотношения координат точек местности и снимка при общем случае съемки:
Те же зависимости при малых значениях α, ω, :
Те же зависимости при α = ω = = О имеют вид:

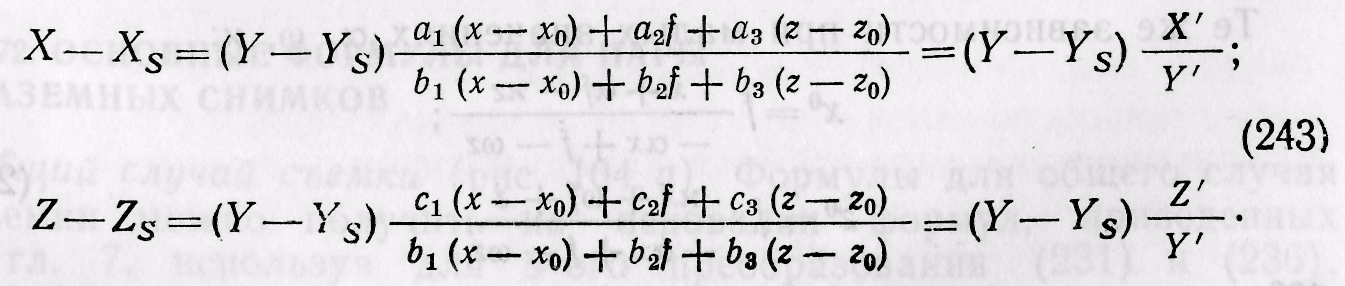
3. Формулы соотношения координат точек снимка и местности при общем случае съемки (формулы обратной фотограмметрической засечки):

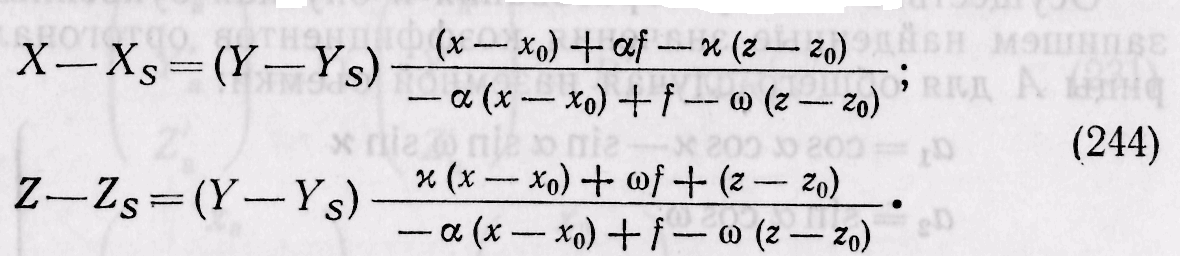
Те же зависимости при малых значениях α, ω, :

Те же зависимости при α = ω = = 0:

Формулы (246), (247), (248) используются для определения элементов ориентирования снимка: х0, z0, f, XS, YS, ZS, α, ω, по опорным точкам объекта, заданным координатами X, Y, Z. Минимальное число таких точек должно быть пять.
4. Зависимости между координатами точек вертикального и наклонного снимков аналогичны зависимостям, приведенным в гл. 3. Учитывая разницу в системах координат и коэффициентов матрицы А, запишем:
Те же зависимости при малых значениях α, ω, :
После некоторых преобразований зависимости (250) можно представить в следующем виде, принимая xo = zo = = 0:
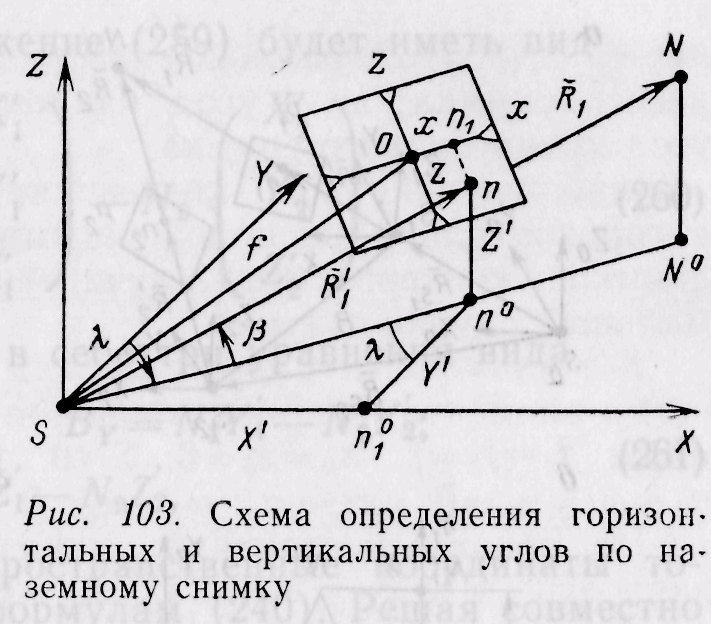
5. Формулы определения горизонтальных и вертикальных углов по наземным снимкам.
Согласно рис. 103 угол λ — это горизонтальный угол между осью Y пространственной системы координат объекта и проекцией направления точки снимка на плоскость XY. Угол β — вертикальный угол между направлением на точку и ее проекцией на плоскость XY. Из построений мы можем записать
![]()
Согласно формулам (240), принимая xo=z0 =0, уравнения (252) можно выразить следующим образом:
При α = ω = = 0 согласно равенствам (239) матрица А будет единичной. Тогда значения λ и β определяют по более простым формулам:
![]()
Точность определения углов λ и β будет зависеть от величины f и ошибок измерения координат точек снимка. Так, для вертикального снимка при α = ω = = 0 ее можно рассчитать по формуле
![]()
При f= 200 мм и mx = mz = 0,01 мм тλ = тβ = 10".