

§ 67. Аналитическая маршрутная фототриангуляция
Различают три основных способа аналитической маршрутной фототриангуляции: способ связок, способ частично зависимых моделей и способ независимых моделей.
Способ связок. Существенная особенность этого способа состоит в одновременном построении и уравнивании фотограмметрической сети по всем снимкам данного маршрута.
В качестве исходных в способе связок используются уравнения коллинеарности (28), выражающие зависимость между координатами точки снимка и координатами соответствующей точки местности.
Полагая, что приближенные значения координат точек местности и элементов внешнего ориентирования снимка известны, приведем уравнения (28) к линейному виду с целью решения задачи по способу наименьших квадратов. В результате получим:

где δXS, δYS, δZS, δα, δω, δ — поправки к приближенным значениям неизвестных; a, b, … , m´ — частные производные от функций (28) по соответствующим переменным; x, у— измеренные координаты точки снимка; хв, ув — координаты той же точки снимка, вычисленные по формулам (28) с использованием приближенных значений неизвестных; v, v´ — поправки к измеренным координатам х и у.
При этом считается, что элементы внутреннего ориентирования (фокусное расстояние фотокамеры и координаты главной точки снимка) известны и определены с достаточной точностью в результате лабораторной или полевой калибровки аэрофотоаппарата.
Частные производные, находящиеся в уравнениях (176) перед поправками к элементам внешнего ориентирования, вычисляют по формулам (95). Остальные частные производные найдем после дифференцирования выражений (28) по переменным X, Y и Z:
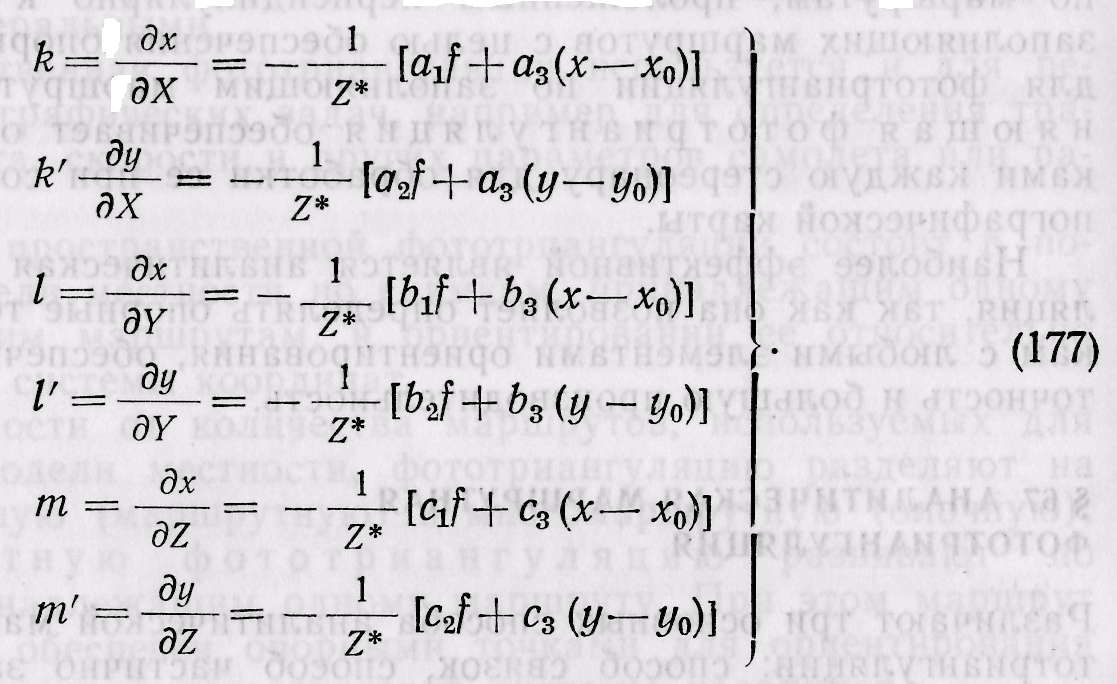
Величина Z* определяется формулой (96).
В уравнениях (176) девять неизвестных — шесть поправок к приближенным значениям элементов внешнего ориентирования снимка и три поправки к приближенным значениям координат определяемой точки местности. Эти уравнения составляются для всех изображений определяемых и опорных точек местности, включенных в фотограмметрическую сеть.
Одно изображение точки сети дает два уравнения поправок (176). Следовательно, общее число уравнений поправок
М = 2т, (178)
где т — количество изображений точек сети.
В маршрутной фототриангуляции каждая точка сети изображается на двух или трех снимках и дает четыре или шесть уравнений поправок.
Общее число неизвестных в системе уравнений поправок
![]()
где п — количество снимков, использованных для построения сети, a k — число определяемых точек местности.
Фотограмметрическую сеть можно построить, если выполняется условие
![]()
Система уравнений поправок, составленная по формулам (176), решается методом последовательных приближений под условием [pv2+ p´v´2]= min, где р и р' — веса измеренных величин х и у. В результате решения определяют элементы внешнего ориентирования снимков и координаты новых точек местности. Кроме того, производят оценку точности определения этих величин.
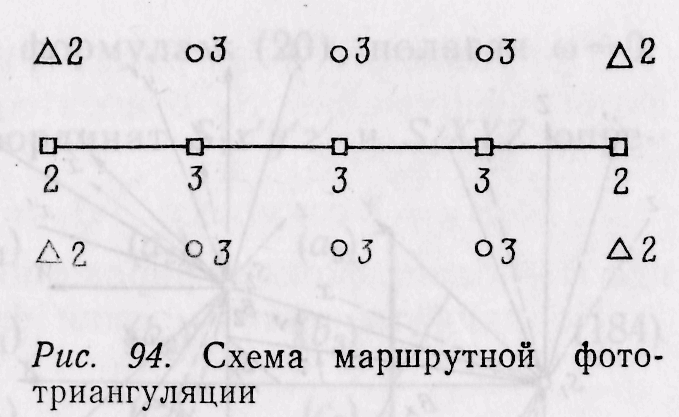
На рис. 94 показана схема маршрутной фототриангуляции. Треугольниками обозначены опорные точки, координаты которых получены геодезическими методами, квадратами и кружками — определяемые точки. Продольное перекрытие снимков 60%. На схеме показано количество изображений каждой точки сети на снимках. Общее число изображений m = 39. Число снимков n=5, количество определяемых точек k=11.
По формулам (178) и (179) находим общее число уравнений поправок М = 78 и общее число неизвестных N=63 в данной маршрутной сети.
Так как M>N, то эту сеть можно построить по способу связок. При этом имеем 15 избыточных уравнений поправок, что обеспечивает надежную оценку точности построения маршрутной сети.
Способ частично зависимых моделей. Этот способ позволяет последовательно построить по стереопарам частично зависимые модели, соединяя их в общую модель, и ориентировать ее относительно геодезической системы координат.
Для построения первой модели произвольно выбирают элементы внешнего ориентирования первого снимка данного маршрута, т. е. левого снимка первой стереопары. Затем определяют элементы взаимного ориентирования первой стереопары и вычисляют дирекционный угол и угол наклона первого базиса фотографирования, а также элементы внешнего ориентирования правого снимка первой стереопары. При этом длину первого базиса фотографирования выбирают произвольно. Зная элементы ориентирования снимков и координаты соответственных точек первой стереопары, находят координаты точек первой модели путем решения прямых засечек. Аналогично создают вторую и последующие модели. Однако в качестве элементов внешнего ориентирования левого снимка второй (последующей) стереопары принимаются не произвольные величины, а полученные в результате обработки первой (предыдущей) стереопары. Выполнение этого условия обеспечивает построение всех моделей в единой системе координат, принятой для создания первой модели. При этом масштаб последующей модели отличается от масштаба предыдущей, так как длину базиса фотографирования выбирают произвольно при построении каждой модели. Последующую модель приводят к масштабу предыдущей по связующим точкам. Полученную таким образом общую модель ориентируют по опорным точкам, устраняя при этом деформацию модели.
Элементы
взаимного ориентирования снимков
![]()
![]() (рис.
95) получим строгим способом, изложенным
в гл. 8.
(рис.
95) получим строгим способом, изложенным
в гл. 8.
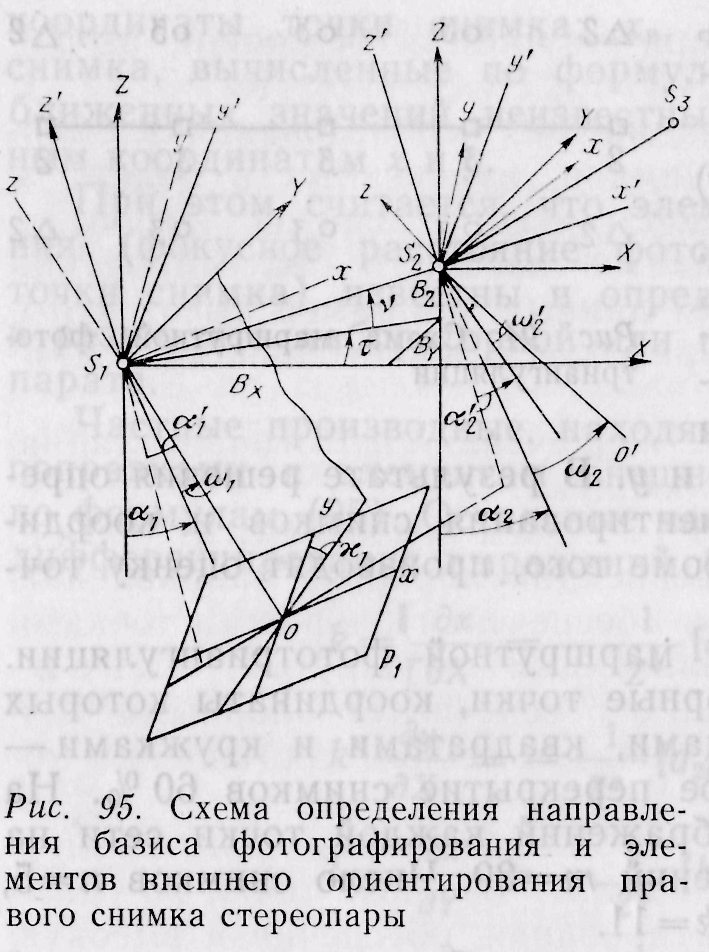
Дирекционный
угол τ и угол наклона ν базиса
фотографирования найдем по угловым
элементам внешнего ориентирования
левого снимка α1,
ω1,
![]() и элементам взаимного ориентирования
α´1,
ω´1,
Углы α1,
ω1,
определяют ориентирование системы
координат S1xyz
относительно
системы S1XYZ.
Системам соответствует матрица
и элементам взаимного ориентирования
α´1,
ω´1,
Углы α1,
ω1,
определяют ориентирование системы
координат S1xyz
относительно
системы S1XYZ.
Системам соответствует матрица
элементы которой найдем по формулам (20).
Углы
τ и ν
получим по направляющим косинусам, как
углы Эйлера. Для этого систему координат
S1xyz
установим
в положение S1x'y'z',
при
котором ось х'
совпадает
с базисом фотографирования, а ось z'
находится
в главной плоскости левого снимка S1oS2.
Чтобы
придать системе S1xyz
такое
положение, повернем ее на углы
![]() и α1´.
Этим
поворотам соответствует матрица
и α1´.
Этим
поворотам соответствует матрица
которая получается путем транспонирования матрицы
Элементы этих матриц найдем по формулам (20), полагая ω = 0, α = α' и = .
Взаимное положение систем координат S1x'y'z' и S1XYZ определяет матрица
При введении углов а, со, к за основные оси приняты z и Z, а при использовании углов т и v — оси х w X. Учитывая это, находим, что углам а и со соответствуют углы —т и —v, которые определяем по формулам (22) путем циклической замены букв и индексов: а заменим на Ь, Ъ на с, с на а; индексы 1, 2, 3 — на 2, 3, 1. В результате получим
![]()
Угловые элементы внешнего ориентирования правого снимка найдем по угловым элементам внешнего ориентирования левого снимка и по элементам взаимного ориентирования.
Перенесем систему координат S1x'y'z' параллельно из левого конца базиса S1 в правый S2 и повернем ее на углы (см. рис. 95). Тогда она совпадет с системой S2xyz правого снимка. При этом ось z будет совмещена с главным лучом S2o' правой связки. Положение системы S2xyz относительно S2XYZ определяет матрица
где
Элементы этой матрицы найдем по формулам (20), заменив α, ω, на
Учитывая матрицу (184), напишем

Теперь можно применить формулы (22) и получить
![]()
Приращения фотограмметрических координат правой точки фотографирования S2 относительно левой S1 (см. рис. 95) найдем по формулам
![]()
где В — базис фотографирования.
Координаты правой точки фотографирования
![]()
Для построения модели приведем координаты соответственных точек стереопары к горизонтальным снимкам. Используя для этого формулы (43) и учитывая формулы (14), найдем
где X1´, Y1´, Z1´ —пространственные координаты точки левого снимка, вычисленные по формулам (14) как функции плоских координат x1, y1 и элементов ai1, bi1, ci1 матрицы (181); Х2', Y2', Z2' — пространственные координаты точки правого снимка, вычисленные по формулам (14) как функции плоских координат х2, y2 и элементов матрицы (187); f— фокусное расстояние снимков.
Вычислим приращения координат каждой точки модели относительно левой точки фотографирования. Для этого преобразуем формулы (105). Учитывая, что в данном случае ХО = ВХ и ZO = BZ, Х'=хº, Y'=y°, Z' = —f, получим
Фотограмметрические координаты точек модели найдем по формулам
![]()
Аналогично построим вторую модель, используя в качестве элементов внешнего ориентирования левого снимка величины, полученные при создании первой модели.
Для приведения второй модели к масштабу первой найдем масштабный коэффициент
![]()
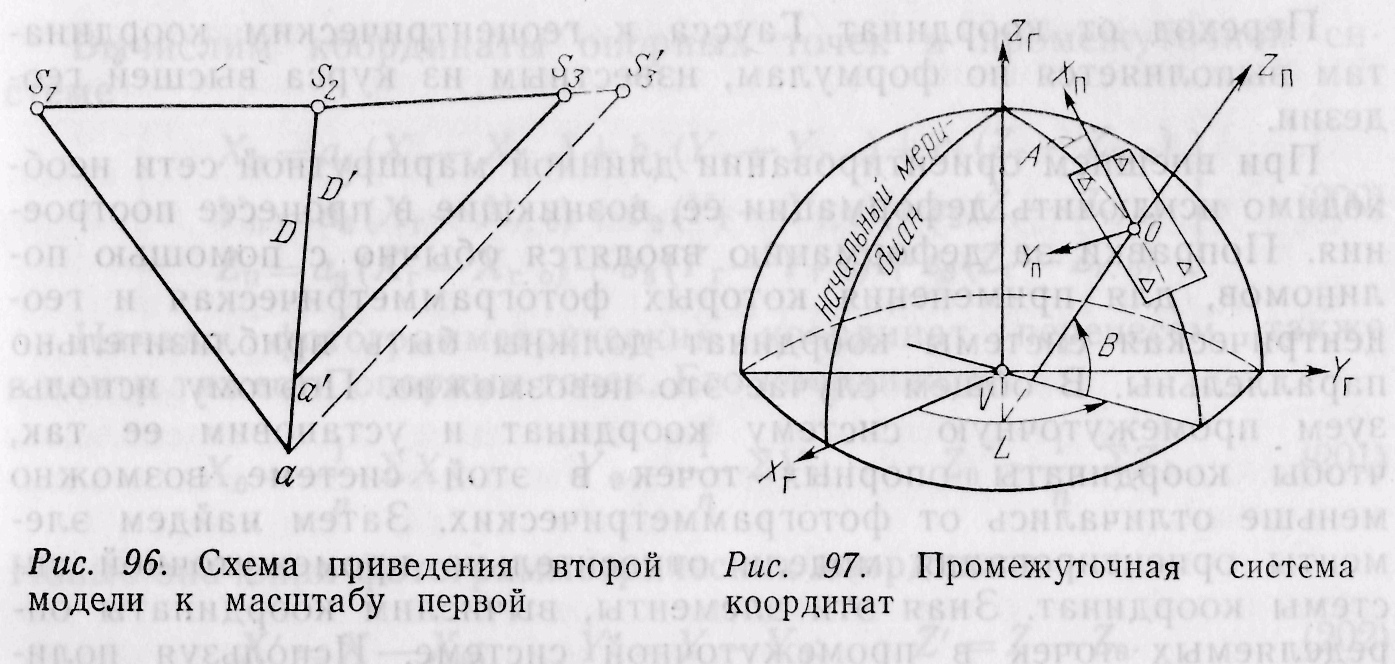
где D и D' — расстояния от точки фотографирования S2 до связующей точки на первой и второй моделях (рис. 96). Эти расстояния вычислим по разностям координат связующей точки и точки S2:
![]()
Масштабный коэффициент следует определять по центральной и двум боковым связующим точкам, а в качестве вероятнейшего значения этой величины использовать среднее весовое.
Координаты точки фотографирования S3 и всех точек второй модели в системе координат первой модели найдем по формулам
где Bx, BY, Bz — составляющие базиса фотографирования второй модели; ΔХ, ΔY, ΔZ — приращения координат точки второй модели относительно точки S2.
Аналогично построим и приведем к масштабу третью и остальные, модели. В результате получим модель маршрута, имеющую одинаковый масштаб и единую систему координат.
Перейдем к внешнему ориентированию маршрутной сети по опорным точкам.
В общем случае фототриангуляционная сеть может иметь значительную длину, простираясь в нескольких зонах системы координат Гаусса. Начало и направления координатных осей этой системы устанавливаются отдельно для каждой зоны. Однако для внешнего ориентирования сети необходимо определить положение опорных точек в единой системе координат. В качестве такой системы используем систему прямоугольных координат XгYгZгс началом в центре эллипсоида (рис. 97). Эти координаты называются геоцентрическими. Достоинство геоцентрической системы координат состоит в том, что она едина для всего эллипсоида.
Переход от координат Гаусса к геоцентрическим координатам выполняется по формулам, известным из курса высшей геодезии.
При внешнем ориентировании длинной маршрутной сети необходимо исключить деформации ее, возникшие в процессе построения. Поправки за деформацию вводятся обычно с помощью полиномов, для применения которых фотограмметрическая и геоцентрическая системы координат должны быть приблизительно параллельны. В общем случае это невозможно. Поэтому используем промежуточную систему координат и установим ее так, чтобы координаты опорных точек в этой системе возможно меньше отличались от фотограмметрических. Затем найдем элементы ориентирования модели относительно промежуточной системы координат. Зная эти элементы, вычислим координаты определяемых точек в промежуточной системе. Используя полиномы, внесем поправки в эти координаты за деформацию модели. От исправленных координат точек сети в промежуточной системе перейдем к геоцентрическим, а затем к координатам Гаусса.
Начало промежуточной системы координат совместим с центром тяжести опорных точек. Его координаты:
где Li, Bi Hi — географические координаты опорных точек; п — число опорных точек. Ось Zп совместим с нормалью к эллипсоиду, а ось Хп направим так, чтобы ее азимут А был приблизительно равен оси X фотограмметрической системы координат.
Направляющие косинусы, характеризующие ориентирование промежуточной системы координат относительно геоцентрической, найдем по формулам
Вычислим координаты опорных точек в промежуточной системе

Начало фотограмметрических координат перенесем также в центр тяжести опорных точек. Его координаты:
![]()
Новые значения фотограмметрических координат:
![]()
Найдем масштабный коэффициент по опорным точкам

Эту величину получим по нескольким парам опорных точек. Вероятнейшее значение ее выведем как среднее весовое и используем для приведения фотограмметрической сети к масштабу промежуточной системы
![]()
Полагая, что модель подобна местности, найдем элементы ориентирования ее Хп.о, Уп.о, Zп.о, ξ, η, θ относительно промежуточной системы координат. Эту задачу решим по опорным точкам, применив способ, изложенный в гл. 8.
Затем вычислим координаты определяемых точек в промежуточной системе:

где ai, bi, сi, — направляющие косинусы, вычисляемые по формулам (20) путем замены α, ω, на ξ, η, θ.
Используя полиномы, найдем исправленные координаты определяемых точек в промежуточной системе

Коэффициенты Аi, Bi, Ci получим по опорным точкам, составив и решив уравнения

Каждая опорная точка позволяет составить три уравнения (207) с 18-ю неизвестными. Следовательно, для определения коэффициентов Ai, Вi, Ci необходимо иметь не менее шести опорных точек.
От исправленных координат точек сети в промежуточной системе перейдем к геоцентрическим координатам
Наконец, по геоцентрическим координатам получим координаты Гаусса определяемых точек, применив формулы высшей геодезии.
Если маршрутная сеть короткая, то при внешнем ориентировании ее нет необходимости применять геоцентрическую систему. В этом случае можно использовать только систему координат Гаусса, учитывая, что эта система левая, а система фотограмметрических координат правая. В связи с этим следует перед внешним ориентированием сети заменить координатные оси X и У системы Гаусса на У и X, а в конце этого процесса произвести обратную замену.
Кроме того, после приведения сети к масштабу фотограмметрические высоты точек необходимо исправить за влияние кривизны Земли
![]()
где D — расстояние от середины сети до точки; R — радиус Земли.
Способ независимых моделей. По каждой стереопаре создается модель в локальной (базисной) системе координат и в произвольном масштабе. При этом порядок построения моделей тоже произвольный.
Чтобы получить модель, измеряют координаты точек стереопары, включенных в фотограмметрическую сеть, определяют элементы взаимного ориентирования снимков и вычисляют координаты точек модели. Созданные таким образом одиночные модели соединяют в общую модель с помощью связующих точек.
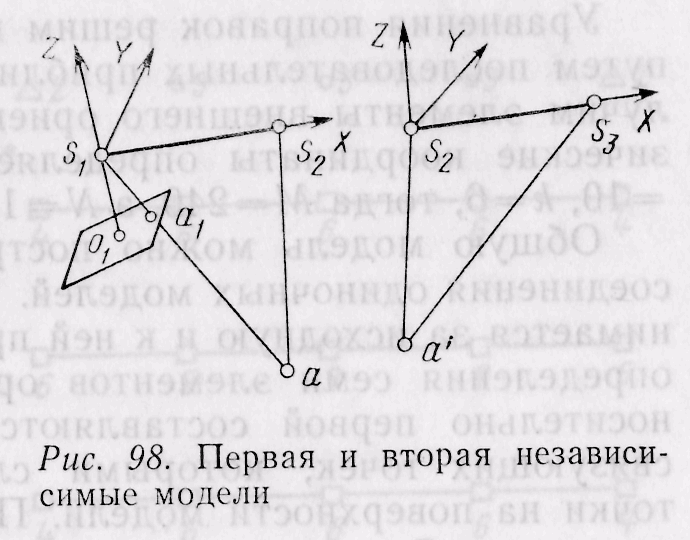
Для построения одиночной модели используем систему координат, ось X которой совмещена с базисом фотографирования, а плоскость XZ — с главной базисной плоскостью левого снимка (рис. 98).
Элементы
взаимного ориентирования снимков
![]() и
и
![]() найдем способом, изложенным в гл. 8.
найдем способом, изложенным в гл. 8.
Произвольно выбрав длину базиса фотографирования В, вычислим фотограмметрические координаты точек модели по формулам (106), представив их в виде
![]()
где x1° и y1º — трансформированные координаты точки левого снимка; р° — трансформированный продольный параллакс
![]()
Трансформированные координаты точек стереопары вычислим по формулам (43). При этом направляющие косинусы найдем по формулам (20): для левого снимка по элементам взаимного ориентирования α1´, ω1´= 0 и ; для правого — по .
Элементами внешнего ориентирования каждой независимой модели относительно геодезической системы координат OXгYгZг служат: координаты левой точки фотографирования в системе OXгYгZг т. е. величины Хо, Yo, Zo; углы ξ, η и θ, определяющие направления осей координат фотограмметрической системы относительно геодезической, и масштабный коэффициент t.
Найдем эти элементы, полагая, что приближенные значения их и геодезических координат определяемых точек известны.
Для этого составим уравнения (139) для каждой одиночной модели. Пусть каждая независимая модель имеет 8 точек — 2 центра проекции и 6 точек на поверхности модели, из которых часть является опорными. Каждая точка дает три уравнения (139). Следовательно, для каждой модели получим 24 уравнения поправок, а количество уравнений поправок для всей маршрутной сети
![]()
где п — число одиночных моделей.
Общее число неизвестных в системе уравнений поправок: N= 7n + 3,4(n+1) — 3k или
![]()
где k — число опорных точек.
Уравнения поправок решим по способу наименьших квадратов путем последовательных приближений. В результате решения получим элементы внешнего ориентирования всех моделей и геодезические координаты определяемых точек местности. Пусть п = 10, k = 6, тогда M = 240, а N=184.
Общую модель можно построить и путем последовательного соединения одиночных моделей. В этом случае первая модель принимается за исходную и к ней присоединяется вторая модель. Для определения семи элементов ориентирования второй модели относительно первой составляются уравнения (139) для четырех связующих точек, которыми служат центр проекции S2 и три точки на поверхности модели. При этом образуется 12 уравнений поправок с 7-ю неизвестными.
Решив эти уравнения, вычисляют по формулам (137) координаты точек второй модели в системе координат первой модели.
Аналогично присоединяют третью и другие модели. Полученная таким образом общая модель ориентируется по опорным точкам относительно геодезической системы координат по методике, принятой для способа частично зависимых моделей.