

Глава 5
ОБРАТНАЯ ПРОСТРАНСТВЕННАЯ
ФОТОГРАММЕТРИЧЕСКАЯ ЗАСЕЧКА
§ 34 Классификация способов определения элементов внешнего ориентирования снимков
Для трансформирования снимков по установочным элементам и определения координат точек местности методом прямой засечки необходимо знать элементы внешнего ориентирования снимков.
Различают две группы способов определения элементов внешнего ориентирования снимков.
В первую группу входят способы, основанные на использовании опорных точек. Эти способы позволяют найти элементы внешнего ориентирования в результате решения уравнений, выражающих зависимость между координатами опорных точек на местности и соответствующих им точек на снимке. Такая задача называется обратной пространственной фотограмметрической засечкой и решается в камеральных условиях.
Способы второй группы служат для определения элементов внешнего ориентирования снимков в полете и основаны на применении специальных приборов. Эти способы рассмотрены в §11. Большое значение они имеют в космических исследованиях при картографировании планет и их спутников.
§ 35. Математическая формулировка задачи и точность определения элементов внешнего ориентирования
Способы определения элементов внешнего ориентирования снимков, составляющие первую группу, можно разделить на две подгруппы. К первой подгруппе принадлежат способы, позволяющие в результате решения уравнений непосредственно получить неизвестные элементы. Ко второй подгруппе относятся способы, в которых предполагается, что приближенные значения элементов внешнего ориентирования известны, а в результате решения уравнений находят поправки к этим значениям.
Способы второй подгруппы легко допускают применение метода наименьших квадратов, что имеет существенное значение, особенно для оценки точности определения элементов.
Рассмотрим способ, входящий во вторую подгруппу и позволяющий найти не только элементы внешнего ориентирования снимка, но и элементы внутреннего ориентирования.
Для теоретического обоснования этого способа используем формулы (28), выражающие связь между координатами х и у точки снимка и координатами X, Y и Z соответствующей точки местности.
Пусть известны приближенные значения элементов ориентирования снимка и даны измеренные координаты изображений опорных точек на снимке. Кроме того, известны координаты опорных точек на местности.
Вычислим
по формулам (28) координаты изображений
опорных точек на снимке и обозначим
их через (х)
и
(у).
Для
вычислений используем приближенные
значения неизвестных. Очевидно,
вычисленные координаты будут отличаться
от измеренных х
и
у.
Обозначим
поправки к приближенным значениям
ориентирования через
![]()
Полагая, что имеем избыточные измерения, составим уравнения поправок
После дифференцирования выражений (28) получим частные производные

![]()
аi, bi , сi — направляющие косинусы, вычисляемые по формулам (20).
Представим уравнения поправок в матричной форме, учитывая обозначения частных производных:
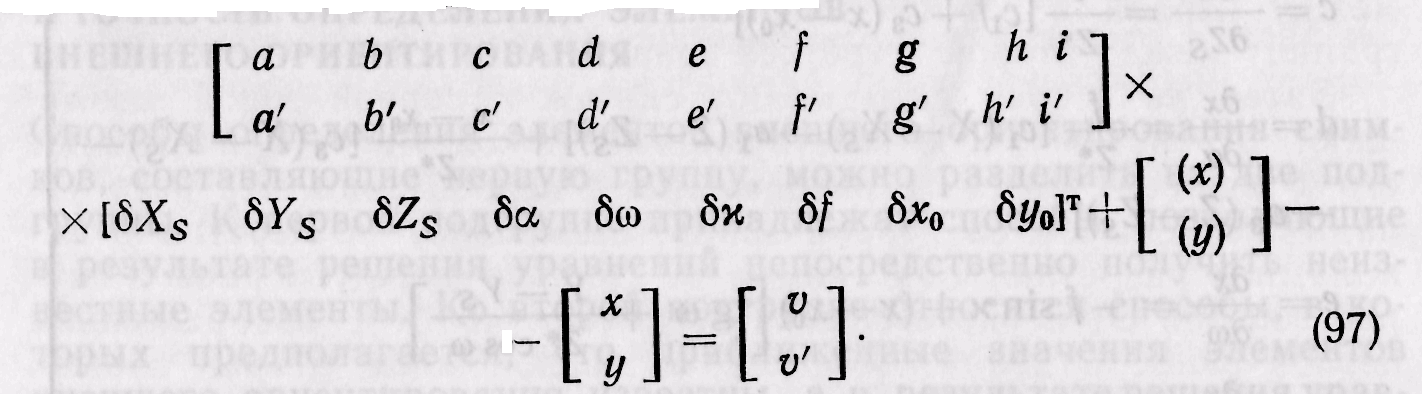
Одна опорная точка дает два уравнения с девятью неизвестными и весами р и р'. Следовательно, для решения задачи необходимо не менее пяти точек.
Уравнения (97) решаются под условием [pv2 + p'v´2] = min методом последовательных приближений.
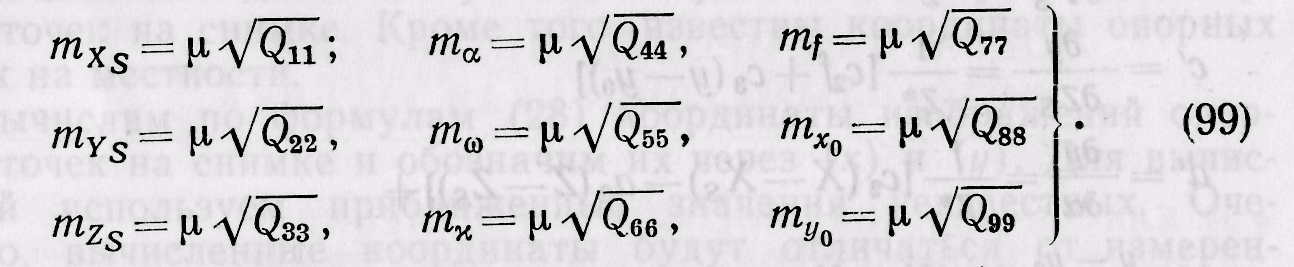
Для оценки точности решения задачи в последнем приближении вычисляют весовые коэффициенты Q и поправки v. Находят ошибку единицы веса

где п — число опорных точек. Вычисляют средние квадратиче-ские ошибки элементов
Изложенный способ пригоден для снимков с любыми элементами ориентирования. Если угловые элементы внешнего ориентирования малы, то уравнения (97) можно представить в таком виде:
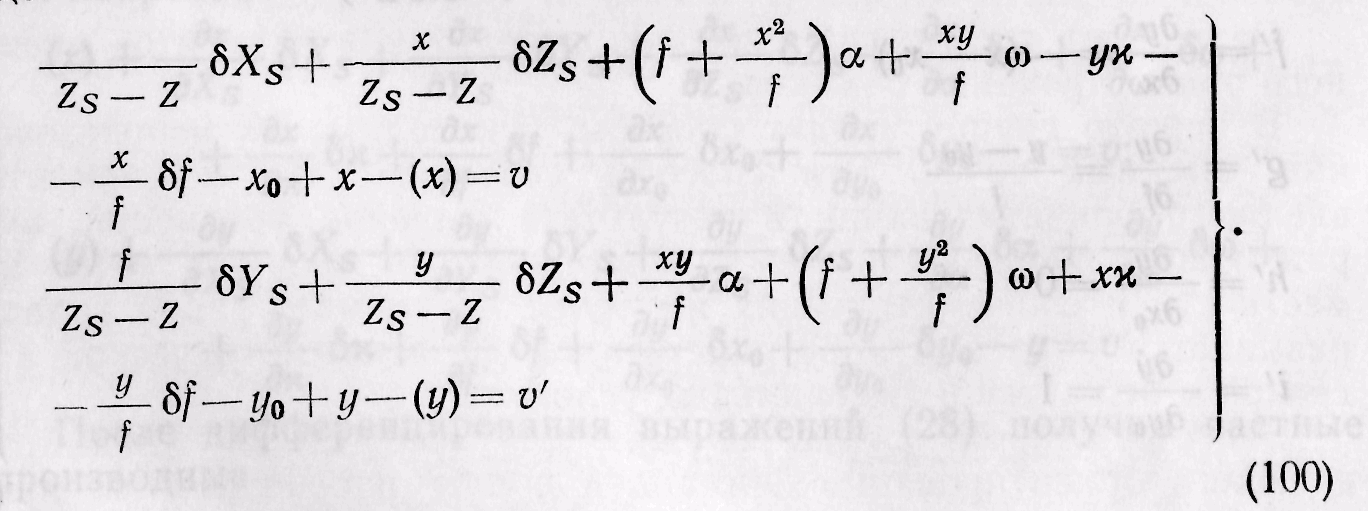
Данный способ позволяет при определении элементов внешнего ориентирования учесть влияние элементов внутреннего ориентирования, величины которых в полете могут отличаться от значений, полученных в лабораторных условиях.
В случае равнинной местности уравнения поправок плохо обусловлены и точность определения элементов внутреннего ориентирования недостаточна.
Если элементы внутреннего ориентирования известны с достаточной точностью, то в уравнениях поправок будет только шесть неизвестных, для определения которых необходимо иметь не менее трех опорных точек.
Изложенный здесь способ используется и для калибровки фотокамер и снимков, а также для решения различных нетопографических задач, например для определения траектории, скорости и колебаний самолета и других носителей.
Г л а в а 6
СТЕРЕОСКОПИЧЕСКИЙ ЭФФЕКТ И ЕГО
ИСПОЛЬЗОВАНИЕ