§ 54. Конструктивные формы пространственной засечки на аналоговых универсальных приборах
На аналоговых универсальных приборах построение пространственной засечки с помощью оптико-механических устройств осуществляется в виде двух конструктивных форм: треугольник и треугольник плюс параллелограмм.
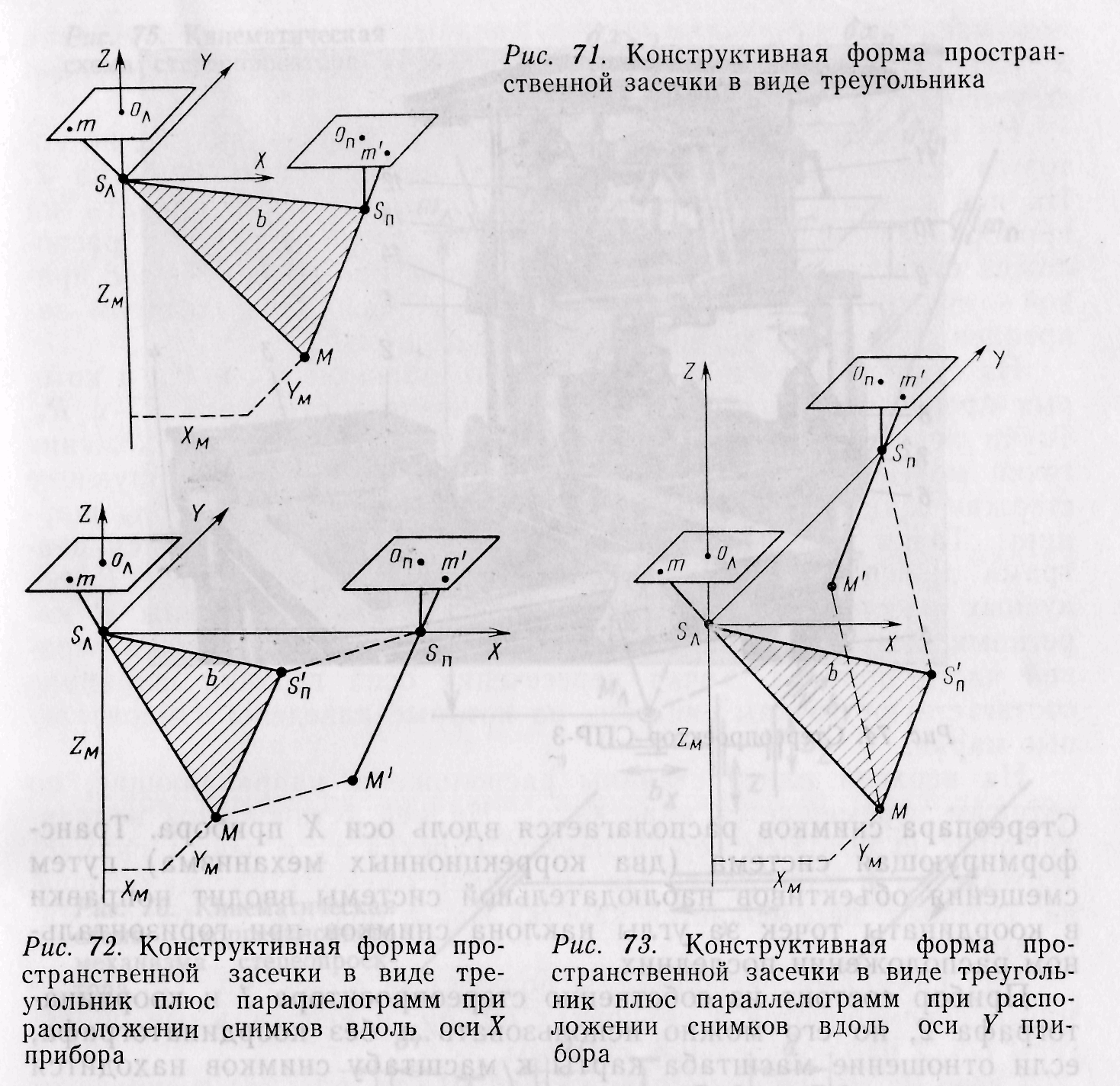
Пространственную засечку в виде треугольника (рис. 71) образуют три точки: два центра проекции SЛ, SП и определяемая точка модели М. Такая форма засечки имеет место только на приборах оптического типа, так как два одноименных проектирующих луча могут пересекаться, если они восстановлены оптическим путем.
К недостаткам этой формы засечки нужно отнести невозможность установки небольших значений базиса проектирования, так как проектирующие камеры своими размерами ограничивают сближение точек SЛ и SП. Кроме того, при наличии в приборе только двух проектирующих камер становится невозможной обработка маршрута снимков без перестановки их из камеры в камеру.
Если после обработки первой пары нужно приступить к обработке второй, то, несмотря на то, что второй снимок ориентирован в координатной системе прибора, его приходится вынимать из правой камеры, устанавливать в левую и заново ориентировать вместе с третьим снимком.
При конструктивной форме засечки треугольник плюс параллелограмм (рис. 72) правый проектирующий луч SП M' отодвинут параллельно самому себе от одноименного левого луча SЛ M. В результате получаются две геометрические фигуры: треугольник засечки SЛSП'M и параллелограмм SП'SПM'M. При неизменном расстоянии между центрами проекции SЛ, SП перемена расстояния между точками М и М' приводит к изменению величины базиса проектирования, который при MM' = SЛSП равен нулю, при ММ'< SЛSП устанавливается внутрь, а при MM'> SЛSП — наружу. Таким образом, при наличии только двух проектирующих камер имеется возможность обрабатывать маршрут аэроснимков без перекладки снимков, устанавливая нечетные снимки в левую камеру, а четные в правую и вводя базис проектирования то внутрь, то наружу.
При такой форме засечки не требуется непосредственного пересечения одноименных проектирующих лучей и их можно заменить стержнями или линейками. В результате эта форма засечки стала основной на большинстве универсальных приборов.
Недостатком этой формы засечки являются большие размеры прибора вдоль оси X. Однако большинство универсальных приборов сконструированы так, что базис проектирования устанавливается только внутрь, и тем самым размеры прибора вдоль оси X частично сокращены.
Данная форма засечки позволяет сделать прибор еще более компактным вдоль оси X, если снимки установить вдоль оси У. В результате параллелограмм также расположится примерно вдоль оси У (рис. 73). Размеры прибора вдоль этой оси существенно не возрастут, так как величина проекции базиса проектирования на ось У изменяется в небольших пределах (примерно ±10 мм) и каретки, несущие снимки, раздвигать на большие расстояния не нужно.
§ 55. Стереопроектор г. В. Романовского
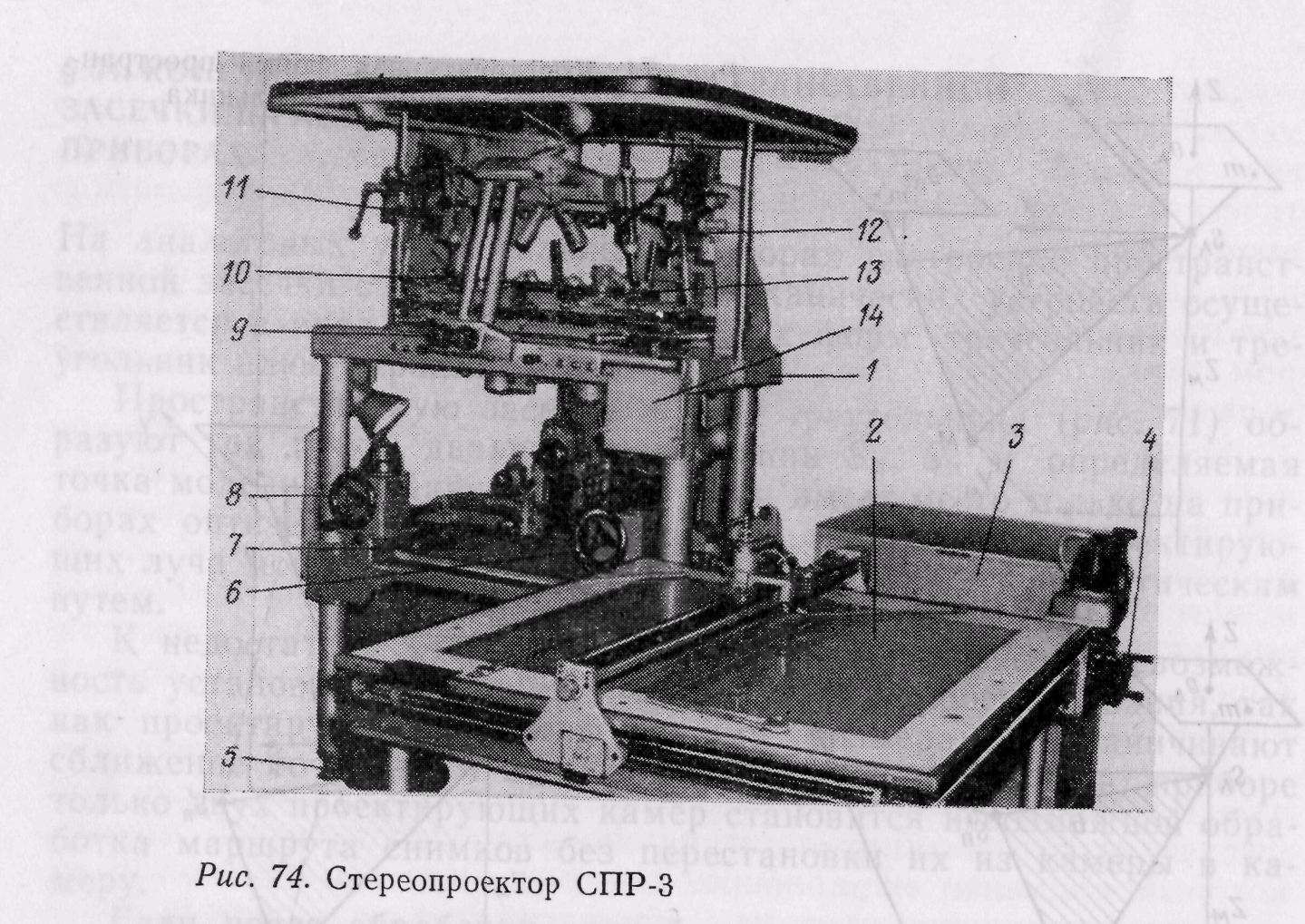
Стереопроектор СПР-3 (рис. 74) — высокоточный стереофотограмметрический прибор механического типа, предназначен для создания топографических карт и сгущения геодезической сети по плановым аэроснимкам. Обработка снимков осуществляется с преобразованием связок проектирующих лучей. Конструктивная форма пространственной засечки— треугольник плюс параллелограмм.
Стереопара снимков располагается вдоль оси X прибора. Трансформирующая система (два коррекционных механизма) путем смещения объективов наблюдательной системы вводит поправки в координаты точек за углы наклона снимков при горизонтальном расположении последних.
Прибор состоит из собственно стереопроектора / и координатографа 2, но его можно использовать и без координатографа, если отношение масштаба карты к масштабу снимков находится в пределах от 0,5 до 2. Запасные принадлежности уложены в тумбочку 3, в верхней крышке которой с левой стороны имеется световой пульт для центрирования снимков в снимкодержателях.
Управление работой прибора наблюдатель выполняет с помощью трех штурвалов: двух ручных и ножного. Левый ручной штурвал 8 служит для перемещения измерительной марки в пространстве модели вдоль оси X, а правый ручной штурвал 6 — вдоль оси Y. Ножной штурвал 5 служит для стереоскопического наведения измерительной марки на точки модели с целью измерения координат Z.
Стереоскопическое наблюдение пары снимков, установленных в снимкодержатели 10 и 13, производится через окуляры 9. Прибор комплектуется двумя парами окуляров с увеличением б и 10х. Снимок с опорными точками крепится на пульте 14, где имеется освещение как на отражение, так и на просвет.
Кинематическая схема прибора приведена на рис. 75. На нижней плите станины за ручными штурвалами расположены две направляющие, по которым перемещается каретка Y. На ней рас-
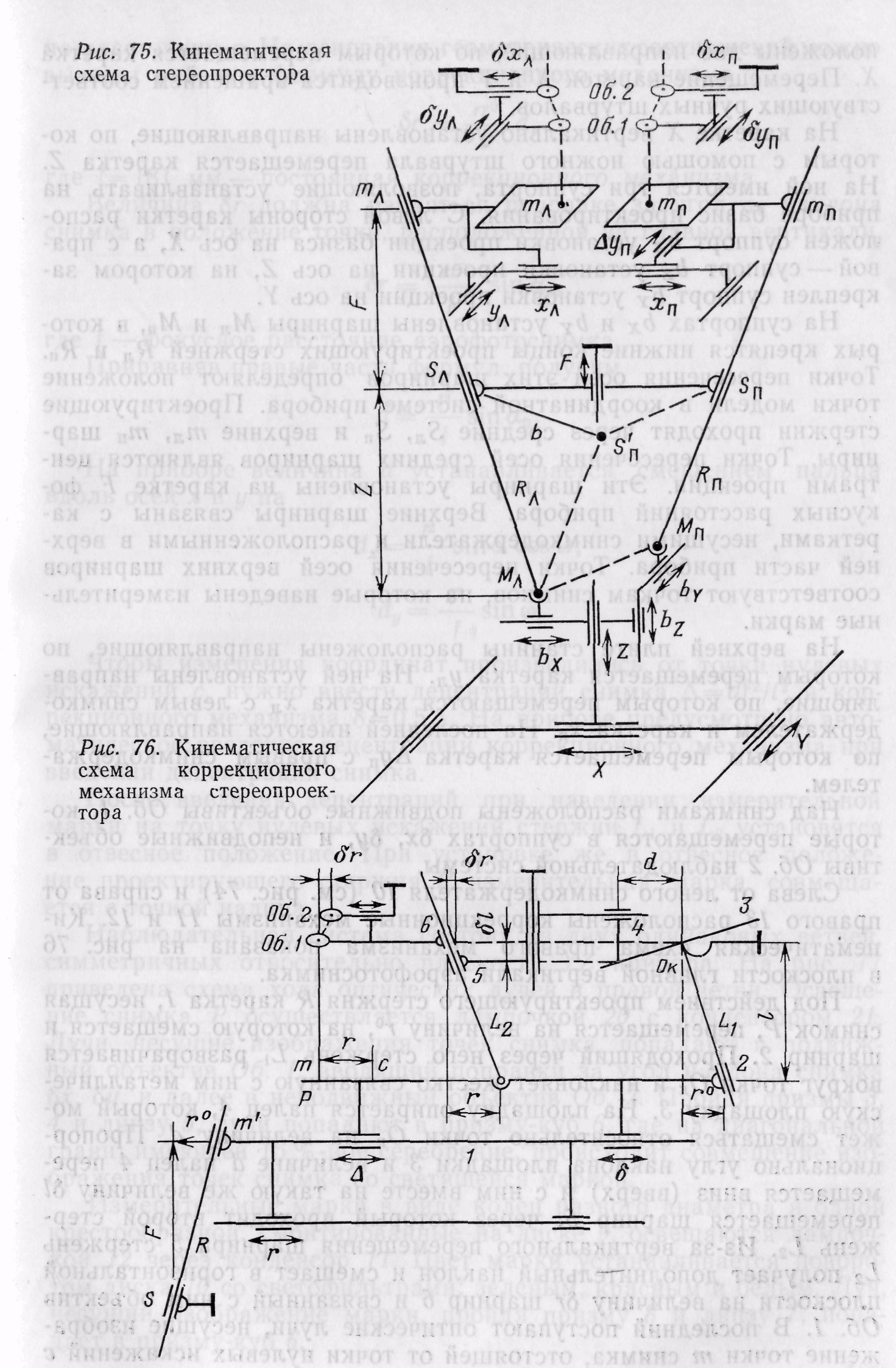
положены две направляющие, по которым перемещается каретка X. Перемещение кареток X и У производится вращением соответствующих ручных штурвалов.
На каретке X вертикально установлены направляющие, по которым с помощью ножного штурвала перемещается каретка Z. На ней имеются три суппорта, позволяющие устанавливать на приборе базис проектирования. С левой стороны каретки расположен суппорт bz установки проекции базиса на ось X, а с правой— суппорт bz установки проекции на ось Z, на котором закреплен суппорт bY установки проекции на ось У.
На суппортах Ьх и bY установлены шарниры Мл и Мп, в которых крепятся нижние концы проектирующих стержней Rл и Rn. Точки пересечения осей этих шарниров определяют положение точки модели в координатной системе прибора. Проектирующие стержни проходят через средние SЛ, SП и верхние тл, тn шарниры. Точки пересечения осей средних шарниров являются центрами проекции. Эти шарниры установлены на каретке F фокусных расстояний прибора. Верхние шарниры связаны с каретками, несущими снимкодержатели и расположенными в верхней части прибора. Точки пересечения осей верхних шарниров соответствуют точкам снимков, на которые наведены измерительные марки.
На верхней плите станины расположены направляющие, по которым перемещается каретка ул. На ней установлены направляющие, по которым перемещаются каретка хл с левым снимкодержателем и каретка хп. На последней имеются направляющие, по которым перемещается каретка Δуп с правым снимкодержателем.
Над снимками расположены подвижные объективы Об. 1, которые перемещаются в суппортах δх, δу, и неподвижные объективы Об. 2 наблюдательной системы.
Слева от левого снимкодержателя 10 (см. рис. 74) и справа от правого 13 расположены коррекционные механизмы 11 и 12. Кинематическая схема правого механизма показана на рис. 76 в плоскости главной вертикали аэрофотоснимка.
Под действием проектирующего стержня R каретка 1, несущая снимок Р, перемещается на величину г°, на которую смещается и шарнир 2. Проходящий через него стержень L1 разворачивается вокруг точки Ок и наклоняет жестко связанную с ним металлическую площадку 3. На площадку опирается палец 4, который может смещаться относительно точки Ок на величину d. Пропорционально углу наклона площадки 3 и величине d палец 4 перемещается вниз (вверх) и с ним вместе на такую же величину б/ перемещается шарнир 5, через который проходит второй стержень L2. Из-за вертикального перемещения шарнира 5 стержень L2 получает дополнительный наклон и смещает в горизонтальной плоскости на величину 8г шарнир 6 и связанный с ним объектив Об. 1. В последний поступают оптические лучи, несущие изображение точки т снимка, отстоящей от точки нулевых искажений с на расстоянии r. На основании геометрических соотношений можно вывести рабочую формулу коррекционного механизма
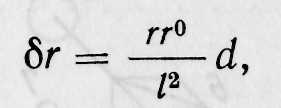
где l=181 мм — постоянная коррекционного механизма.
Величина δr должна равняться поправке за угол α0 наклона снимка в положение точки, расположенной на главной вертикали,
где f — фокусное расстояние аэрофотоснимка. Приравняв правые части формул, получим
На приборе величина d устанавливается смещением пальца вдоль осей х и у на
Чтобы измерения координат производились от точки нулевых искажений с, нужно ввести децентрации снимка Δ= df2/l2 и коррекционного механизма δ= 0,5Δ. На приборе предусмотрено автоматическое введение децентрации коррекционного механизма при введении децентрации снимка.
После введения децентрации при наведении измерительной марки на точку нулевых искажений стержни L1 и L2 установятся в отвесное положение. При установке же в отвесное положение проектирующего стержня R измерительная марка совмещается с точкой надира.
Наблюдательная система состоит из двух одинаковых ветвей, симметричных относительно плоскости YZ прибора. На рис. 77 приведена схема хода оптических лучей в правой ветви. Освещение снимка Р осуществляется лампочкой 20 с конденсором 21. Лучи, несущие изображения точек снимка, попадают в подвижный объектив Об. 1, вводящий поправки за угол наклона снимка δх, δу, и далее в неподвижный объектив Об. 2. Пройдя призмы 3, 4 и линзу 5, лучи попадают в призму-куб 6, где на диагональной грани, имеющей 15 %-ное серебрение, происходит совмещение изображения точек снимка со светящейся маркой.
Измерительные марки в виде колец разного диаметра и одной крестообразной, смонтированные на диске 9, освещаются лампочкой 12 через конденсор 11. Цвет марки устанавливается поворотом диска 10 со светофильтрами: зеленым, красным и белым. Луч, несущий изображение марки, пройдя призму 5 и линзу 7, попадает в призму-куб 6.

После призмы-куба оптические лучи, пройдя ряд призм и линз 13—17, попадают в окуляр 18, имеющий в передней части оптический клин 19. Ромбическая призма 17 служит для установки окуляров на расстоянии глазного базиса.
Координатограф подключается к прибору через редукторы 4 (см. рис. 74), где сменой пар шестерен можно устанавливать коэффициент перехода от масштаба модели к масштабу карты. Если координатограф не подключен, то основу укладывают на планшет 7, расположенный под каретками X и Y прибора.
Технические характеристики стереопроектора СПР-3 и координатографа ПК-1: