

§ 48. Построение фотограмметрической модели
Зная элементы взаимного ориентирования пары снимков, можно построить фотограмметрическую модель местности, т. е. определить координаты точек модели.
Для этого измерим на снимках координаты соответственных точек и используем формулы (105). Пространственные координаты точек стереопары, которые входят в эти формулы, вычислим по измеренным плоским координатам, применив формулы (14), а направляющие косинусы найдем по формулам (20), используя
![]()
В качестве составляющих базиса выберем произвольные значения, например Х0 = В, Y0 = Zo = 0. Поэтому модель получим в произвольном масштабе.
Координаты точек модели можно вычислить и по формулам (106), выведенным для идеального случая съемки, если в эти формулы вместо х1, у1 и р подставить трансформированные координаты х1° и у1 0 и продольный параллакс р°. При этом величины х1° и у1 0 находят по формулам (43), а р° = х1° — х 2°. Направляющие косинусы и в этом случае вычисляют по формулам (20) с использованием элементов взаимного ориентирования.
§ 49. Внешнее ориентирование модели
Внешнее ориентирование модели включает приведение ее к заданному масштабу и установку относительно геодезической системы координат.
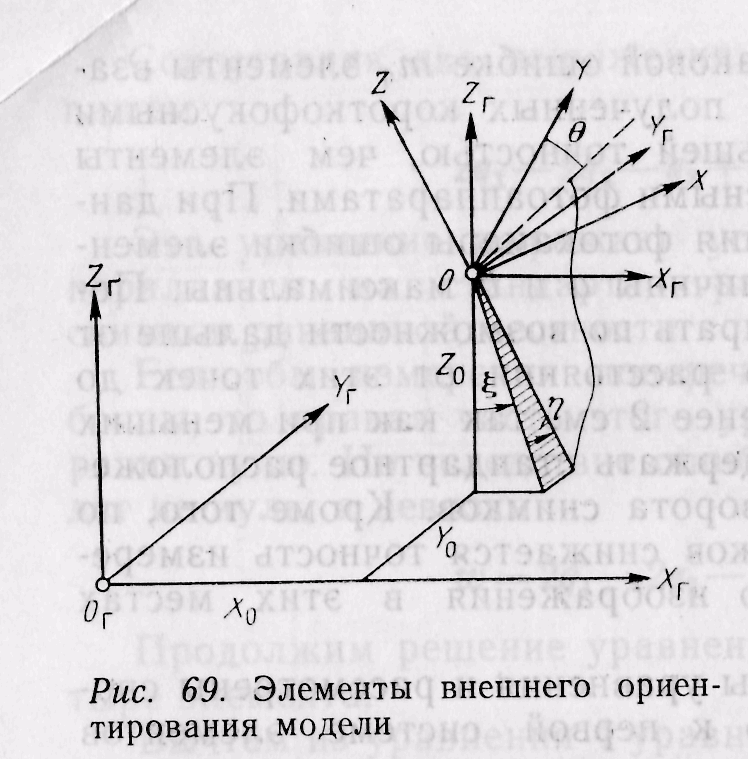
Фотограмметрическая система координат OXYZ, в которой определено положение точек модели, и геодезическая система OГ XTYTZГ Проведем из начала фотограмметрических координат линии, параллельные осям XT, YT и ZГ.
Элементами внешнего ориентирования модели называются величины, определяющие ее масштаб и положение относительно геодезической системы координат. К. ним относятся: t — знаменатель масштаба модели; Хо, Уо, Zo — геодезические координаты начала фотограмметрической системы координат; ξ—продольный угол наклона модели, составленный осью OZT с проекцией оси OZ на плоскость XГ OZГ; η — поперечный угол наклона модели, заключенный между осью OZ и ее проекцией на плоскость XTOZT; θ — угол поворота модели, находящийся в плоскости XOY между осью OY и следом плоскости YrOZ.
Итак, внешнее ориентирование модели определяется семью элементами. Если эти элементы известны, то геодезические координаты точки местности, изобразившейся на модели, можно найти по известным из аналитической геометрии формулам:
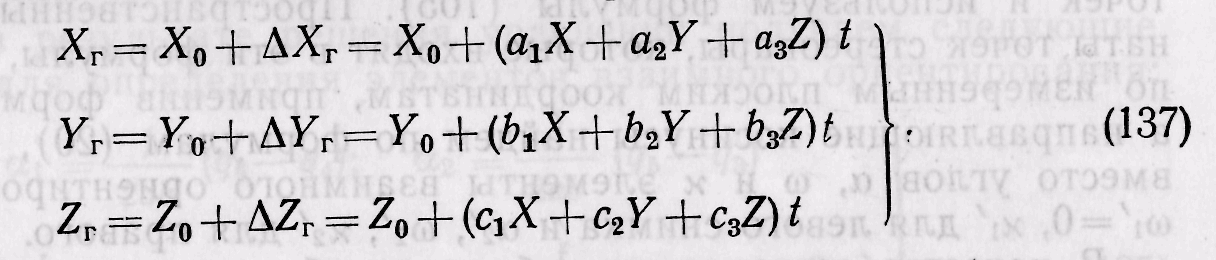
где ΔХГ, ΔУГ, ΔZГ — приращения геодезических координат определяемой точки относительно начала фотограмметрической системы координат; X, У, Z — фотограмметрические координаты точки модели; αi. bi, сi— направляющие косинусы, зависящие от угловых элементов внешнего ориентирования модели и вычисляемые по формулам (20) путем замены α, ω, на ξ, η, θ.
Элементы внешнего ориентирования модели можно определить по опорным точкам. Пусть даны геодезические координаты опорной точки и получены фотограмметрические координаты соответствующей точки модели. Тогда в уравнениях (137) неизвестными будут только элементы внешнего ориентирования модели. Одна опорная точка дает три уравнения с семью неизвестными. Следовательно, для решения задачи необходимо иметь не менее трех опорных точек. Две из них можно определить в плане и по высоте, а для третьей получить только высоту. Однако в данном случае решение будет бесконтрольным.
Полагая, что имеются избыточные данные, применим способ наименьших квадратов. Для этого от строгих уравнений (137) перейдем к приближенным линейным, считая, что значения неизвестных
![]() даны.
Получим
даны.
Получим
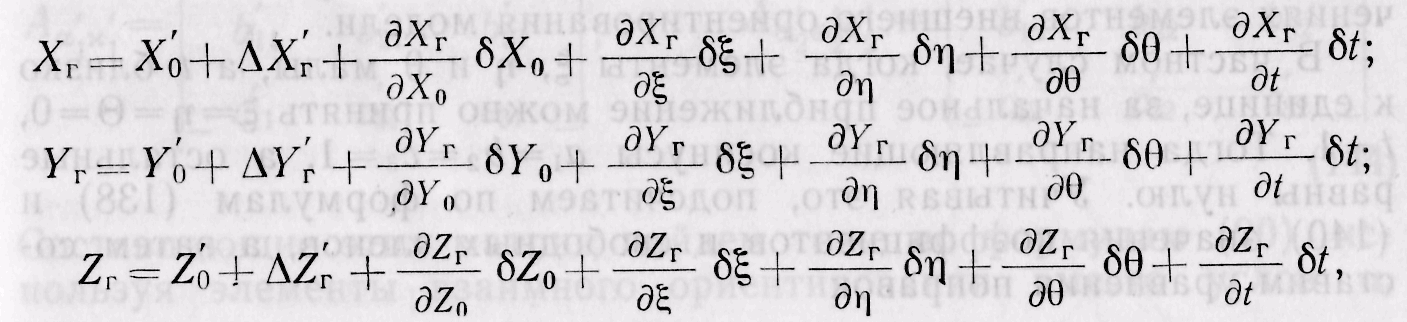
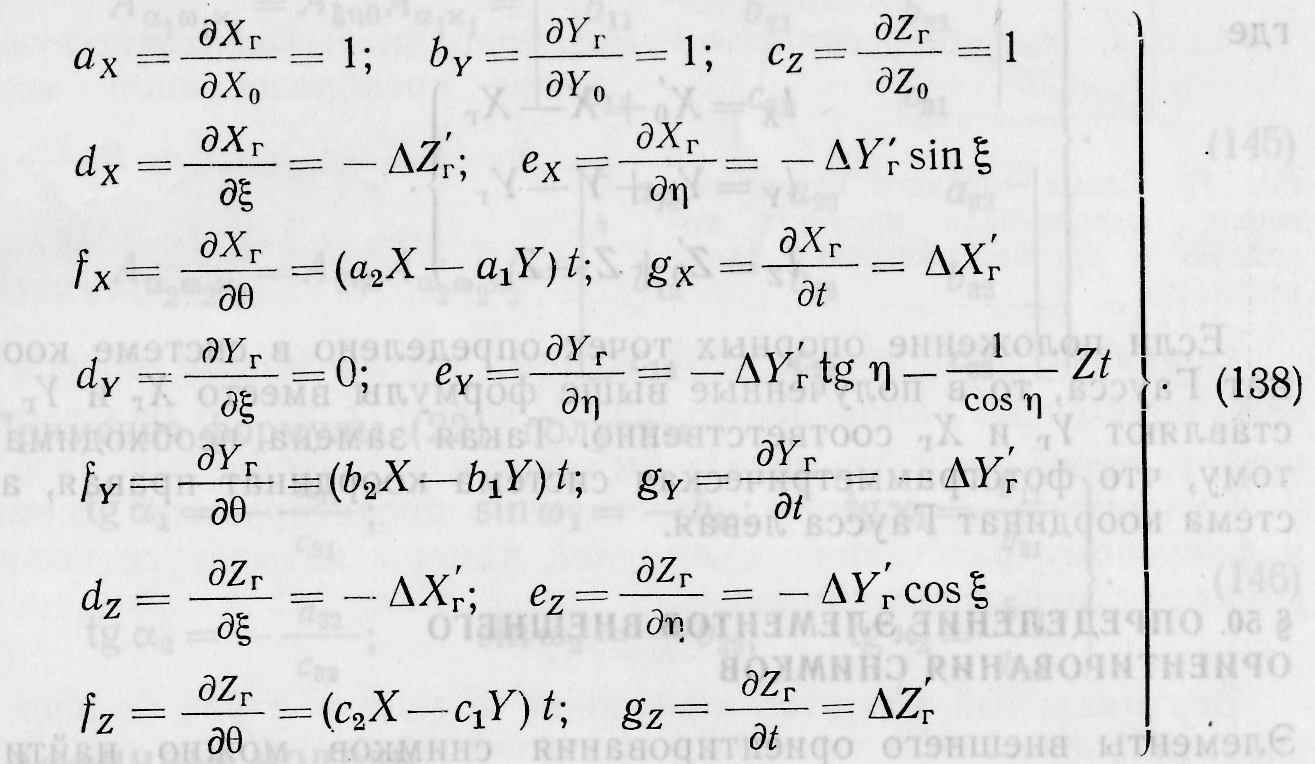
где ΔХ´Г, ΔУ´Г, ΔZ´Г — приращения геодезических координат, вычисленные по приближенным значениям элементов внешнего ориентирования модели; δХ0, δУо, δZ0, δξ, δη, δθ, δt — поправки к приближенным значениям неизвестных. Вычислив частные производные, получим
Напишем уравнения поправок
Уравнения (139) решим путем последовательных приближений под условием [pv2] = min.
Определив элементы внешнего ориентирования модели, перейдем по формулам (137) от координат точек модели к координатам точек местности.
Изложенный выше способ можно применять при любых значениях элементов внешнего ориентирования модели.
В частном случае, когда элементы ξ, η и θ малы, a t близко к единице, за начальное приближение можно принять ξ = η = θ = 0, t=1. Тогда направляющие косинусы α1 = b2 = c3=l, а остальные равны нулю. Учитывая это, подсчитаем по формулам (138) и (140) значения коэффициентов и свободных членов, а затем составим уравнения поправок
Если положение опорных точек определено в системе координат Гаусса, то в полученные выше формулы вместо Хг и Уг подставляют Уг и Хг соответственно. Такая замена необходима потому, что фотограмметрическая система координат правая, а система координат Гаусса левая.