

Программа и методика работы.
Изучить состав лабораторного оборудования (п.1.) и теоретические разделы 2,3,4,5 и 6 Приложения 1.
Включить стенд с микропроцессорным контроллером РР-35 и ПЭВМ. Загрузить на ПЭВМ систему программирования Automation Studio версии 2.4.0.9.
Создать проект под именем «Lab1_N», где вместо N подставить номер выполняемого варианта (задается преподавателем).
Присвоить символьные номера дискретным входам и выходам, используя порядковые номера выполняемого варианта, например INPUT_2, OUTPUT_5. Использовать по 2 входа/выхода с номерами N и N +5.
Создать циклический объект (выполняемую программу) с использованием алгоритмического языка BASIC:
(* cyclic program *)
OUTPUT_N=INPUT_N; при включении входа N, включается ;выход N. при выключении входа N, выключается; выход N.
OUTPUT_N+5=INPUT_N+5; при включении входа N, включается выход N. при выключении входа N+5, выключается; выход N+5.
Откомпилировать программу, загрузить в USER RAM контроллера и убедится в ее выполнении.
Оформить отчет. Подготовить контрольные вопросы. Защитить лабораторную работу. Выключить стенд.
2. Контрольные вопросы
1. Раскройте понятие «микропроцессорная система управления». Какие существуют синонимы данного понятия.
2. Что такое дискретный вход или выход. Как определяются их состояния.
3. Определите понятие бит/байт. Какое максимальное число можно записать в 1 байт.
4. Понятие и состав программного обеспечения. Операционная система. Система программирования. Прикладная программа.
5. Как создать проект в B&R Automation Studio.
6. На каких языках могут создаваться прикладные программы в системе программирования B&R Automation Studio.
7. Как объявляются переменные и присваиваются символьные имена дискретным входам и выходам.
8. В чем Вы видите достоинства и (или) недостатки микропроцессорных систем управления.
9. Дайте характеристику дискретным входам и выходам контроллера РР-35.
10. Нарисуйте схему подключения кнопки с замыкающим контактом к дискретному входу Input 02.
11. Нарисуйте схему подключения светодиода к дискретному выходу Output 01.
Приложение 1
1. Лабораторное оборудование
Цикл лабораторных работ по курсу «Микропроцессорные системы управления» проводится на базе специализированного класса, включающего 5 рабочих мест (рис. П.1.1).

Рис. П.1.1. Общий вид учебного класса
Каждое рабочее место включает стенд с компьютеризированным панель-контроллером типа РР-35 с набором дискретных входных (INPUT 01..INPUT 11) и выходных (OUTPUT 01.. OUTPUT 11) сигналов и персонального компьютера, на котором установлена лицензионная система программирования Automation Studio. Связь между компьютером и панель-контроллером РР-35 организована через последовательный порт COM1. Дискретные входные сигналы(24 В, 10 мА) и дискретные выходные сигналы (24 В, 0.5 А) подключены к клеммникам, расположенным на задней стороне панели (рис.П.1.2)
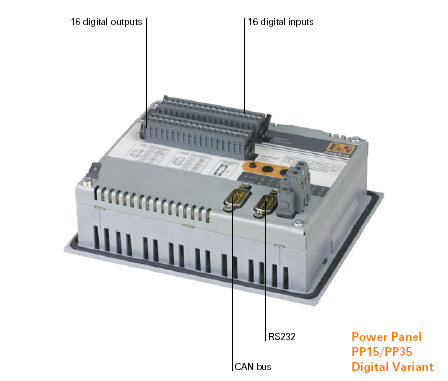
Рис.П.1.2. Общий вид панель-контроллера РР-35 с задней стороны.
Возможны два режима подключения дискретных датчиков –(sink operation), в этом случае на входы через контакт датчика подается +24 В и (source operation), в этом случае, вход через контакт датчика или кнопки заземляется (рис. П.1.3.). Клемник Х2 предназначен для подключения нагрузки к дискретным выходам контроллера, а клемник Х3 для подачи напряжения + 24 В на CPU и другие узлы контроллера (рис. П.1.4.). В зависимости от необходимости выбирается тот или другой вариант подключения входных сигналов (рис. П.1.5). В качестве выходных каскадов используются транзисторные ключи в режиме эмитерного повторителя, поэтому нагрузка, например, катушка реле, с током потребления не более 0,5А подключается между выходом и общим(GND) проводом (рис. П.1.6.).
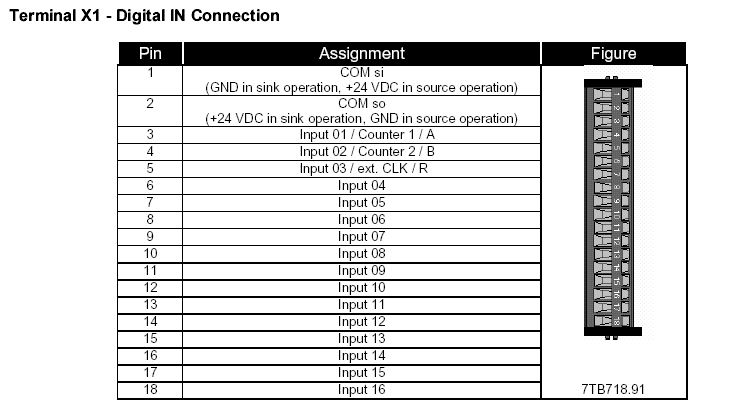 Рис.
П.1.3. Общий вид клемника (terminal
Х1) дискретных входов панель-контроллера
РР-35 и их характеристика.
Рис.
П.1.3. Общий вид клемника (terminal
Х1) дискретных входов панель-контроллера
РР-35 и их характеристика.
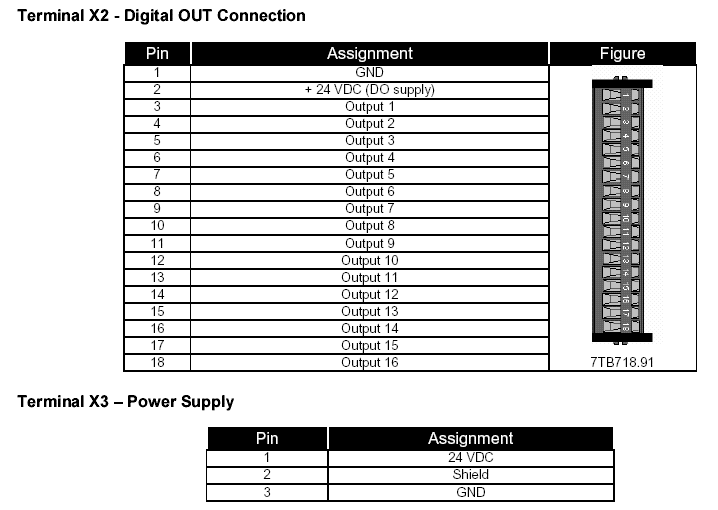
Рис. П.1.4. Общий вид и характеристика дискретных выходов(terminal Х2) и подключения питания (terminal Х3) .