

Глава 9. Работа сил
9.1. Работа постоянной по модулю и направлению силы
Работа постоянной по модулю и направлению силы на прямолинейном перемещении определяется скалярным произведением вектора силы на вектор перемещения точки ее приложения (рис. 3.52).
![]()
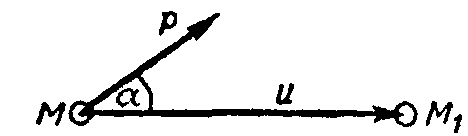
Рис. 3.52
Из векторной алгебры известно, что скалярное произведение двух векторов
![]() ,
,
откуда
![]() .
.
9.2. Элементарная работа силы и методы ее определения
Элементарная работа силы на участке ММ' (рис. 3.53) определяется по формуле
![]() ,
,
где
Р
— модуль силы, соответствующей точке
М; dσ
— длина пути
ММ',
т. е. пройденный точкой элементарный
путь;
![]() - угол,
составленный направлением силы и
скоростью в точке М.
- угол,
составленный направлением силы и
скоростью в точке М.

Рис. 3.53
Элементарную работу обозначают δА, а не dA, так как в общем случае она не является дифференциалом функции. Знак работы в выражении определяется только знаком косинуса угла. Будем определять положение точки М на траектории дуговой координатой s = ОМ (рис. 3.54,а,б), а орт τ, направленный по касательной к траектории, направим в сторону возрастания дуговой координаты.
При движении точки в любом направлении по траектории элементарная работа силы равна
![]() ,
(3.23)
,
(3.23)
где Р- модуль силы, соответствующей точке М; ds - приращение дуговой координаты точки (алгебраическая величина).
а) б)

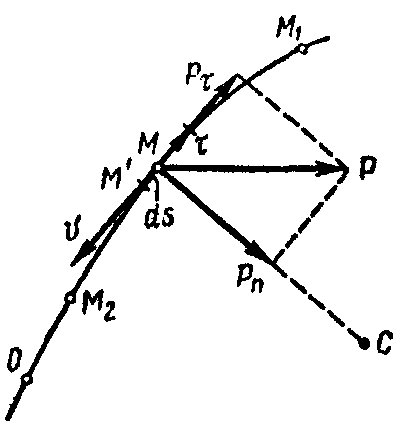
Рис. 3.54
Разложим силу на составляющие, направленные по касательной и главной нормали к траектории в точке М. Проекции силы на касательную и главную нормаль определяются так:
![]() .
(3.24)
.
(3.24)
Пользуясь первой формулой (3.24), выражению (3.23) можно придать вид
![]() .
(3.25)
.
(3.25)
Формула
(3.25) показывает, что работу на перемещение
ds
совершает
только касательная составляющая силы
![]() ,
работа же
нормальной составляющей
,
работа же
нормальной составляющей
![]() ,
перпендикулярной направлению скорости
точки,
равна нулю
,
перпендикулярной направлению скорости
точки,
равна нулю
![]() .
(3.26)
.
(3.26)
где
![]() - вектор элементарного перемещения
точки М.
- вектор элементарного перемещения
точки М.
Обозначив проекции силы на координатные оси X, У, Z, a проекции вектора элементарного перемещения на оси dx, dy, dz, получим скалярное произведение векторов и (рис. 3.55) в виде
![]()
Эта формула дает выражение элементарной работы через проекции силы на оси координат. Работа силы P на конечном перемещении равна
сумме ее работ на элементарных участках
![]() .
.
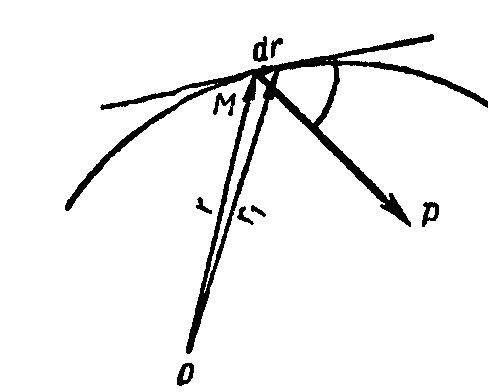
Рис. 3.55
Пользуясь выражениями элементарной работы и переходя к пределу при стремлении числа участков к бесконечности, получим выражения работы силы P на конечном перемещении М1М2:
 ;
;
 ;
;
 ;
;
 ;
;

Работа равнодействующей силы на некотором перемещении равна алгебраической сумме работ составляющих сил на том же перемещении (рис. 3.56)
![]() ,
,
где
![]() -
работы составляющих сил на перемещении.
-
работы составляющих сил на перемещении.


Рис. 3.56 Рис. 3.57
Работа постоянной по модулю и направлению силы на результирующем перемещении равна алгебраической сумме работ этой силы на составляющих перемещениях (рис. 3.57)
,
где - работы силы на составляющих перемещениях.
За единицу работы в системе СИ принимается джоуль (Дж).