

12.2. Общее уравнение динамики
В любой момент движения механической системы с идеальными связями сумма элементарных работ всех активных сил и сил инерции точек системы на любом возможном перемещении равна нулю
![]() .
(3.28)
.
(3.28)
Уравнение (3.28), называется общим уравнением динамики.
В аналитической форме уравнение (3.28) имеет вид
![]() .
.
 Задача
3.24. Грузы А
и В
соединены тонкой нерастяжимой нитью,
переброшенной через блок D.
При опускании вниз груза А
весом Р,
блок D
весом
Задача
3.24. Грузы А
и В
соединены тонкой нерастяжимой нитью,
переброшенной через блок D.
При опускании вниз груза А
весом Р,
блок D
весом
![]() вращается вокруг своей неподвижной
оси, а груз В
весом
вращается вокруг своей неподвижной
оси, а груз В
весом
![]() поднимается вверх по наклонной плоскости,
расположенной под углом
к горизонту. Определить ускорения
а грузов
А
и В.
Коэффициент трения скольжения груза В
о наклонную плоскость равен f.
Блок D
считать однородным круглым диском.
Массой нити пренебречь (рис. 3.84).
поднимается вверх по наклонной плоскости,
расположенной под углом
к горизонту. Определить ускорения
а грузов
А
и В.
Коэффициент трения скольжения груза В
о наклонную плоскость равен f.
Блок D
считать однородным круглым диском.
Массой нити пренебречь (рис. 3.84).
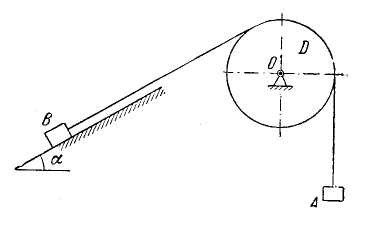
Рис. 3.84
Решение.
Направим ось z
вдоль оси вращения блока D за рисунок.
Радиус блока обозначим r.
Изобразим задаваемые силы, приложенные
к данной системе:
—
вес груза А,
![]() — вес груза В,
— вес блока D.
При наличии идеальных связей, наложенных
на систему, силы реакций связей в общее
уравнение динамики не входят (рис. 3.85).
— вес груза В,
— вес блока D.
При наличии идеальных связей, наложенных
на систему, силы реакций связей в общее
уравнение динамики не входят (рис. 3.85).
Добавив
силу трения скольжения
![]() груза В
о наклонную плоскость, мы считаем,
что на данную систему наложены только
идеальные связи (нить при движении
системы считается натянутой и
нерастяжимой). Остается прибавить
силы инерции материальных точек системы.
Пусть груз А
опускается с искомым ускорением
груза В
о наклонную плоскость, мы считаем,
что на данную систему наложены только
идеальные связи (нить при движении
системы считается натянутой и
нерастяжимой). Остается прибавить
силы инерции материальных точек системы.
Пусть груз А
опускается с искомым ускорением
![]() .
.
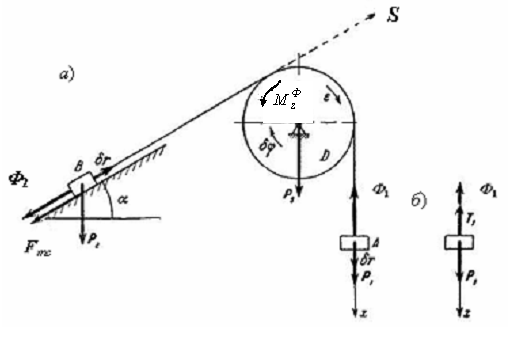
Рис. 3.85
К
грузам А
и В,
совершающим поступательное движение,
приложим равнодействующие сил инерции,
направив их противоположно ускорениям
соответствующих грузов, т. е.
![]() — вверх, а
— вверх, а
![]() —
параллельно наклонной плоскости
вниз, причем
—
параллельно наклонной плоскости
вниз, причем
![]() .
(а)
.
(а)
К
блоку D,
вращающемуся вокруг неподвижной оси,
приложим главный момент сил инерции
![]() ,
знак которого противоположен знаку
проекции углового ускорения
,
знак которого противоположен знаку
проекции углового ускорения
![]() :
:
![]() .
.
Так
как
![]() ,
a
,
a
![]() ,
то
,
то
![]() .
(б)
.
(б)
Главный
вектор сил инерции блока
![]() равен нулю, ибо центр тяжести блока
расположен на оси вращения.
равен нулю, ибо центр тяжести блока
расположен на оси вращения.
Мысленно остановив систему, дадим одной из ее материальных точек возможное перемещение. Можно сообщить линейное возможное перемещение грузу А вверх или вниз либо грузу В— по наклонной плоскости вверх или вниз, либо блоку D — угловое возможное перемещение по или против часовой стрелки.
Дадим
грузу А
возможное перемещение
![]() по вертикали вниз. (Не следует считать,
что направления движения какой-либо
материальной точки и ее возможного
перемещения должны обязательно
совпадать. Направление движения
точки зависит от системы сил, которые
к ней приложены, возможное же перемещение
точки, рассматриваемое из данного
положения, зависит только от связей,
наложенных на эту точку, в остальном
оно произвольно. При этом, в силу
нерастяжимости нити, груз В
получит равное по модулю возможное
перемещение, направленное вдоль
наклонной плоскости вверх, а блок D
получит угловое возможное перемещение
.
Взяв точку нити на ободе блока, получим
зависимость между линейным и угловым
возможными перемещениями
по вертикали вниз. (Не следует считать,
что направления движения какой-либо
материальной точки и ее возможного
перемещения должны обязательно
совпадать. Направление движения
точки зависит от системы сил, которые
к ней приложены, возможное же перемещение
точки, рассматриваемое из данного
положения, зависит только от связей,
наложенных на эту точку, в остальном
оно произвольно. При этом, в силу
нерастяжимости нити, груз В
получит равное по модулю возможное
перемещение, направленное вдоль
наклонной плоскости вверх, а блок D
получит угловое возможное перемещение
.
Взяв точку нити на ободе блока, получим
зависимость между линейным и угловым
возможными перемещениями
![]() ,
(в)
,
(в)
где r — радиус блока.
Применим к данной системе материальных точек общее уравнение динамики, т. е. приравняем нулю сумму работ задаваемых сил (включая силы реакции неидеальных связей) и сил инерции на возможных перемещениях точек системы.
![]() .
(г)
.
(г)
Подставив
в уравнение (г) значение силы трения
![]() и воспользовавшись формулами (а), (б) и
(в), после сокращения на
и воспользовавшись формулами (а), (б) и
(в), после сокращения на
![]() получим:
получим:
![]() ,
,
откуда находим проекцию искомого ускорения грузов А и В
![]() .
.
При
![]() ,
т. е. при
,
т. е. при
![]() ускорение груза направлено вниз.
ускорение груза направлено вниз.
![]() ,
,
откуда определим проекцию на ось z искомого углового ускорения зубчатого колеса 1
 .
.