

7.2. Вращение твердого тела вокруг неподвижной оси
Кинетический момент вращающегося твердого тела относительно неподвижной оси его вращения равен произведению момента инерции тела относительно той же оси на угловую скорость тела (рис. 3.42).
![]() .
.
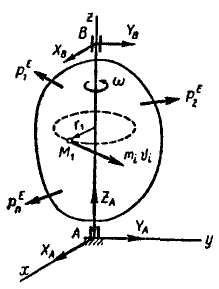
Рис. 3.42
Теорема об изменении кинетического момента механической системы выражается уравнением
![]() .
.
Так как
![]() ,
,
то
![]() ,
,
а потому уравнение принимает вид
![]() .
(3.19)
.
(3.19)
Уравнение (3.19) представляет собой дифференциальное уравнение вращения твердого тела вокруг неподвижной оси.
Задача 3.14. Натяжения ветвей ремня, приводящего во вращение шкив, равны 20 и 40 Н. Шкив имеет вес 80 Н, радиус 30 см и радиус инерции относительно оси вращения 25 см. Составить уравнение вращения шкива из состояния покоя, пренебрегая трением (рис. 3.43).
Решение. Дифференциальное уравнение вращения шкива вокруг неподвижной оси Ох имеет вид
![]() .
.
К
шкиву приложены внешние силы: реакции
ветвей ремня
![]() и
и
![]() ,
вес шкива
,
вес шкива
![]() и составляющие
реакции опоры
и составляющие
реакции опоры
![]() и
и
![]() .
.
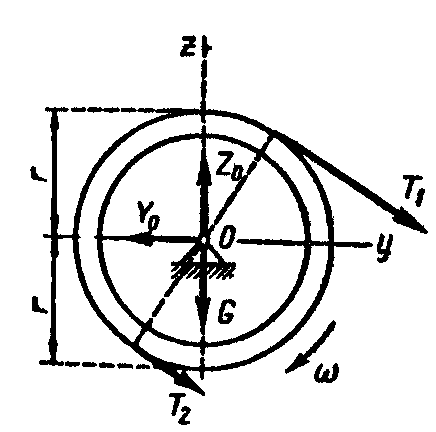
Рис. 3.43
Направление вращения тела принимают всегда за положительное. Тогда моменты сил, направленных в сторону вращения, положительны, а моменты сил, направленных противоположно, отрицательны. Главный момент внешних сил
![]()
(моменты сил , , относительно оси Ох равны нулю). Момент инерции шкива определяем по радиусу инерции:
![]() .
.
Подставляем
числовые значения
![]() и
и
![]() в уравнение
в уравнение
![]()
Отсюда находим угловое ускорение
![]() .
.
Интегрируем дважды по t:
![]() .
.
По
начальным условиям
![]() находим С1
= 0
и C2=0.
Таким образом, уравнение вращения шкива
имеет вид
находим С1
= 0
и C2=0.
Таким образом, уравнение вращения шкива
имеет вид
![]() .
.
7.3. Плоское движение твердого тела
Дифференциальные уравнения плоского движения твердого тела представляют собой совокупность уравнений поступательного движения плоской фигуры вместе с центром масс и вращательного движения относительно оси, проходящей через центр масс (рис. 3.44).
![]() .
.
В том случае, когда траектория центра масс задана, удобно пользоваться дифференциальными уравнениями движения точки С в проекциях на касательную и главную нормаль к этой траектории.
Тогда дифференциальные уравнения плоского движения твердого тела имеют вид:
![]() .
.

Рис. 3.44
где sc - дуговая координата центра масс, vc - его скорость и ρ - радиус кривизны его траектории.
Задача
3.15. Однородный
цилиндр весом G
и радиусом r
катится без скольжения по наклонной
плоскости, составляющей с горизонтом
угол а.
Коэффициент сцепления равен
![]() (рис. 3.45). Определить ускорение движения
центра масс цилиндра и угол наклона
плоскости, при котором начинается
скольжение цилиндра, без учета
сопротивления качению.
(рис. 3.45). Определить ускорение движения
центра масс цилиндра и угол наклона
плоскости, при котором начинается
скольжение цилиндра, без учета
сопротивления качению.
Решение.
Движение цилиндра совершается под
действием трех внешних сил: силы тяжести
,
нормальной реакции плоскости
![]() и силы сцепления
и силы сцепления
![]() .
Направим оси х
и у,
как указано на рисунке. Через центр масс
цилиндра С
проведем оси ξ
и
η и ось ζ,
перпендикулярную плоскости чертежа.
Момент силы относительно оси Сζ
будет положителен, если сила стремится
вращать плоскость чертежа вокруг точки
С
в направлении против вращения часовой
стрелки, и отрицателен - в противоположном
случае.
.
Направим оси х
и у,
как указано на рисунке. Через центр масс
цилиндра С
проведем оси ξ
и
η и ось ζ,
перпендикулярную плоскости чертежа.
Момент силы относительно оси Сζ
будет положителен, если сила стремится
вращать плоскость чертежа вокруг точки
С
в направлении против вращения часовой
стрелки, и отрицателен - в противоположном
случае.

Рис. 3.45
Составим дифференциальные уравнения плоского движения тела:
![]() ,
(а)
,
(а)
![]() ,
(б)
,
(б)
![]() .
(в)
.
(в)
Так
как за рассматриваемый промежуток
времени ус
= r
= const,
то
![]() ,
а потому
из уравнения (б)
,
а потому
из уравнения (б)
![]() ,
откуда
,
откуда
![]() .
.
Дифференциальные
уравнения (а) и (в) содержат три неизвестные
величины:
![]() и
и
![]() .
Для определения
этих
неизвестных к двум составленным
уравнениям добавим еще одно.
.
Для определения
этих
неизвестных к двум составленным
уравнениям добавим еще одно.
Так как цилиндр катится без скольжения, то точка Р соприкасания среднего сечения цилиндра с плоскостью является мгновенным центром скоростей среднего сечения. Поэтому
![]() .
(г)
.
(г)
Проекция скорости точки С на ось х
![]() .
.
Алгебраическая
величина угловой скорости
![]() отрицательна, так как цилиндр вращается
по вращению часовой стрелки, т. е.
отрицательна, так как цилиндр вращается
по вращению часовой стрелки, т. е.
![]() ,
,
где |ω| — абсолютное значение угловой скорости.