

Формулу (г) можно представить в виде
![]() .
.
Дифференцируя это выражение по t, получаем необходимое для решения задачи четвертое уравнение:
![]() .
(д)
.
(д)
Из уравнения (д) имеем
![]() .
.
Момент инерции цилиндра относительно оси Сζ,
![]() .
.
Подставим эти значения в уравнение (в)
![]() или
или
![]() .
.
Решив
это уравнение совместно с уравнением
(а), найдем
![]() и
и
![]() :
:
![]() ,
,
откуда
![]() .
.
Полученный
результат показывает, что центр масс
цилиндра движется равноускоренно с
ускорением
![]() ,
не зависящим от веса цилиндра.
,
не зависящим от веса цилиндра.
Для определения угла наклона плоскости, при котором начинается скольжение цилиндра, воспользуемся известным положением из статики:
![]() .
.
Подставим значения Fсц и N
![]() откуда
откуда
![]() .
.
Таким
образом, скольжение начнется при
![]() .
.
Глава 8. Динамика сферического и свободного движений твердого тела
8.1. Кинетические моменты твердого тела относительно
Неподвижной точки и координатных осей
Кинетический момент твердого тела, совершающего сферическое движение относительно неподвижной точки (рис. 3.46), определяется по общей формуле:
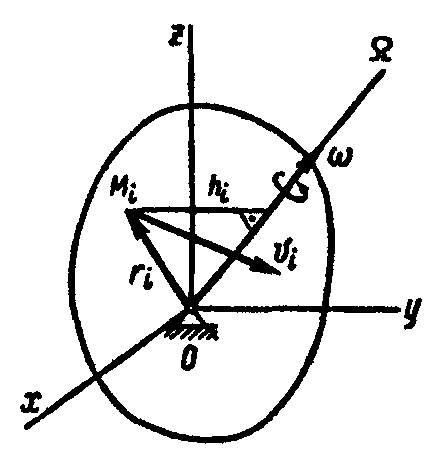
Рис. 3.46
![]() .
.
Кинетический
момент тела относительно оси х,
проходящей через точку О,
как проекция
![]() на ось х имеет
вид
на ось х имеет
вид
![]() ,
,
где
![]() - момент инерции тела относительно оси
х;
- момент инерции тела относительно оси
х;
![]() - центробежный момент инерции тела
относительно осей х
и
у;
- центробежный момент инерции тела
относительно осей х
и
у;
![]() -
центробежный момент инерции тела
относительно осей z
и
х.
-
центробежный момент инерции тела
относительно осей z
и
х.
Подставляя эти значения в выражение, определяющее Lx, получаем формулы для вычисления кинетических моментов тела, совершающего сферическое движение относительно оси х и, по аналогии, относительно осей у и z:
![]() (3.20)
(3.20)
Если за оси координат приняты главные оси инерции в неподвижной точке О, то центробежные моменты инерции тела относительно этих осей равны нулю, т. е.
![]()
тогда формулы (3.20) принимают вид
![]() .
.
8.2. Дифференциальные уравнения сферического движения твердого тела
При сферическом движении твердого тела его кинетический момент относительно неподвижной точки О изменяется согласно уравнению (рис. 3.47)
![]() .
.
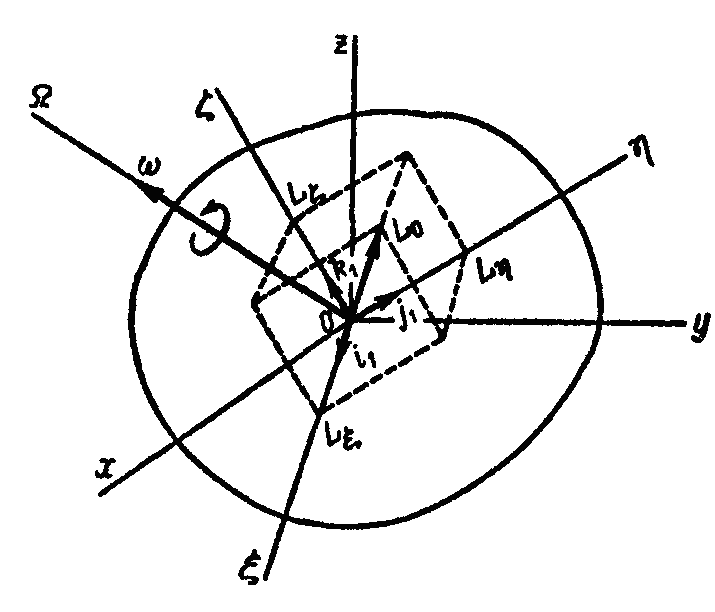
Рис. 3.47
После соответствующих преобразований получим три равенства в проекциях на подвижные оси ξ,η,ζ:
![]()
Если за подвижные координатные оси приняты главные оси инерции тела в точке О, то кинетические моменты тела относительно этих осей определяются по формулам:
![]() (3.21)
(3.21)
В этом случае уравнения (3.21) принимают вид:
![]() (3.22)
(3.22)
где
![]() — моменты
инерции тела относительно его осей
инерции в точке О;
— моменты
инерции тела относительно его осей
инерции в точке О;
![]() — главные
моменты внешних сил, приложенные к телу,
относительно этих осей;
— главные
моменты внешних сил, приложенные к телу,
относительно этих осей;
![]() — проекции вектора угловой скорости
тела и на оси
— проекции вектора угловой скорости
тела и на оси
![]() .
Эти проекции можно определить по формулам
Эйлера:
.
Эти проекции можно определить по формулам
Эйлера:
где
![]() - углы Эйлера, определяющие положение
тела при сферическом движении.
- углы Эйлера, определяющие положение
тела при сферическом движении.
Дифференциальные уравнения (3.22) сферического движения твердого тела называются динамическими уравнениями Эйлера.