

19. Перевірка епюр внутрішніх зусиль
Усі опорні реакції і внутрішні зусилля визначаються, виходячи з умов рівноваги рами. Тому вся рама або будь яка частина мають задовольняти умови рівноваги. Отже, якшо викреомити з рами будь яку її частину ( вузол, стержень, сукупність стержнів тощо ) і прикласти до неї всі зовнішні і внутрішні сили, які виникають в місцях перерізів, то рівняння рівноваги, складені для цієї частини, повинні задовольнятися.
Наприклад для перевірки рівноваги потрібно вирізати вузол ( K ), в місцях перерізів прикладаємо внутрішні сили, величини яких визначаються з відповідних епюр і спрямовані за правилом знаків. Так, додатні поздовжні сили повинні діяти в напрямку від вузла, що відповідає розтягненню. Додатні поперечні сили прикладаються щодо вузла в напрямку руху годинникової стрілки. Згинальні моменти спрямовуються згідно з розтягненими волокнами в місцях перерізів.
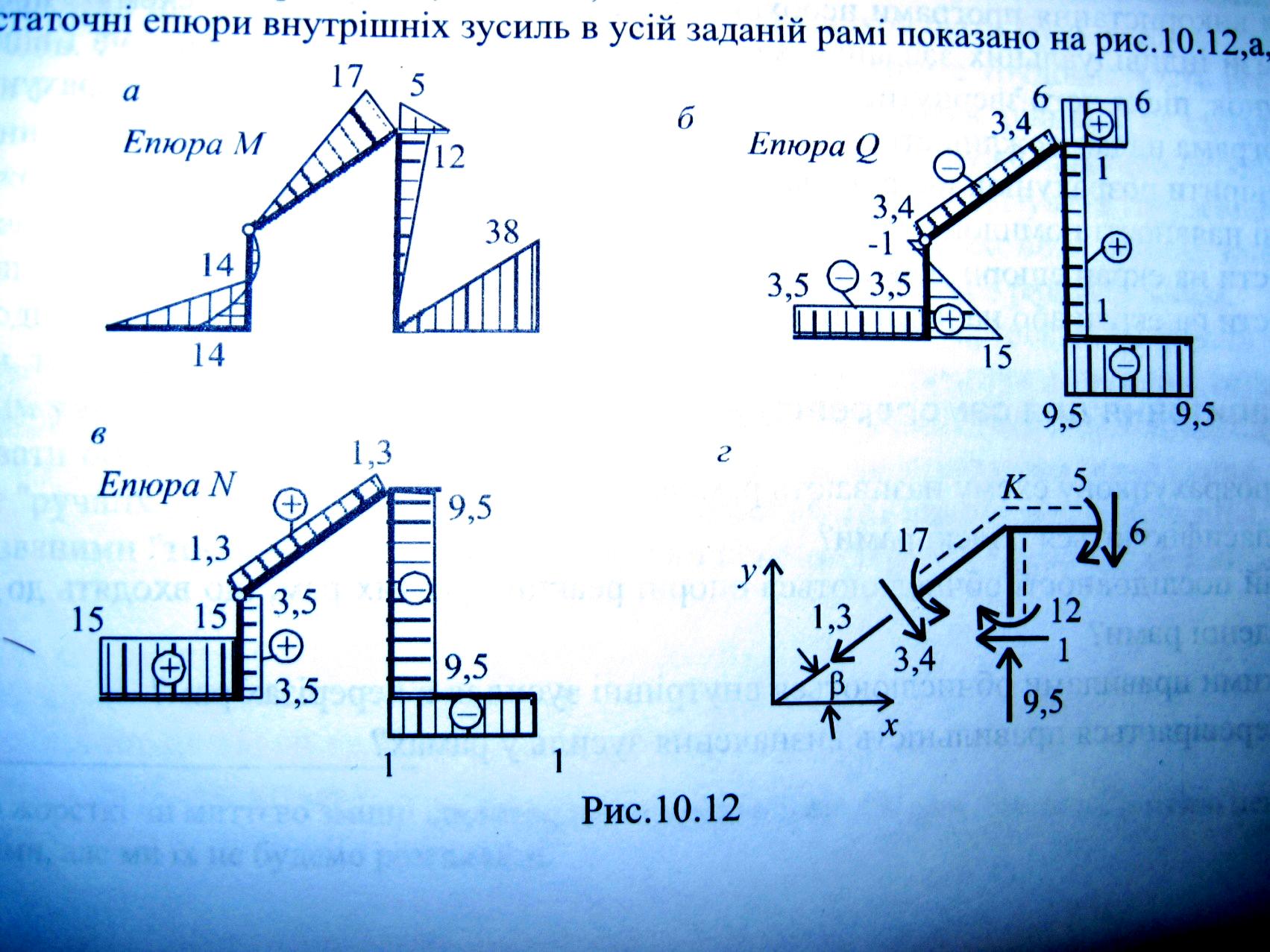
ΣFx=0→-1.3*0.8+3.4*0.6-1≡0
ΣFy=0→-1.3*0.6-3.4*0.8+9.5-6≡0
ΣMK=0→12+5+17≡0
20. Перевірки розрахунку плоских рам
Перевірка епюр внутрішніх зусиль
Усі опорні реакції і внутрішні зусилля визначалися, виходячи з умов рівноваги рами. Тому вся рама або будь-яка її частина мають задовольняти умови рівноваги. Отже , якщо виокремити з рами будь-яку її частину ( вузол , стержень, сукупність стержнів тощо) і прикласти до неї всі зовнішні і внутрішні сили , які виникають в місцях перерізів, то рівняння рівноваги , складені для цієї частини, повинні задовольнятися
ЕFx=0
EFy=0
EM=0
Тангенціальна перевірка
Q=dM / dX
Намалювати раму самому!!!!!
Побудувати епюри!!!!!!
І зробити перевірки!!!!!
Елементарно!!!!!!!!!!!!!!!!!!!
21 . Дійсна і можлива робота зовнішніх зусиль
Р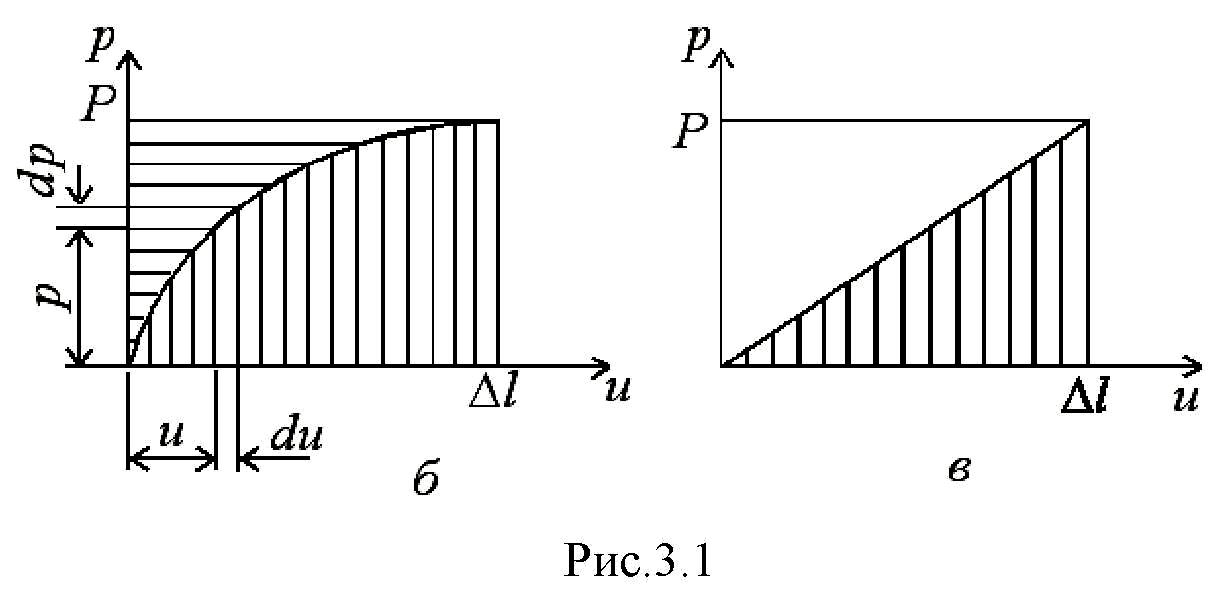
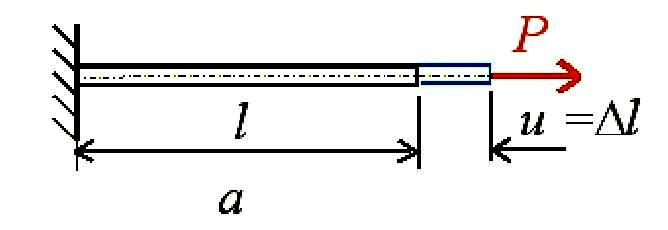
 озглянемо
статичне завантаження стержня (рис.3.1,а),
який внаслідок дії розтягуючої сили P
дістає
подовження
озглянемо
статичне завантаження стержня (рис.3.1,а),
який внаслідок дії розтягуючої сили P
дістає
подовження![]() Якщо
матеріал стержня є фізично-нелінійним,
графік залежності між навантаженням і
переміщенням кінця стержня буде
криволінійним (рис.3.1,б). Для
обчислення
роботи, яку
виконала
сила
P,
візьмемо
переміщення u
в
довільний
момент
часу і
надамо йому приріст du.
Тоді
робота
сили
виражається інтегралом
Якщо
матеріал стержня є фізично-нелінійним,
графік залежності між навантаженням і
переміщенням кінця стержня буде
криволінійним (рис.3.1,б). Для
обчислення
роботи, яку
виконала
сила
P,
візьмемо
переміщення u
в
довільний
момент
часу і
надамо йому приріст du.
Тоді
робота
сили
виражається інтегралом
і являє собою площу між кривою і віссю u, яка на графіку (рис.3.1,б) заштрихована вертикальною штриховкою. Таку роботу називають дійсною. Якщо ж надати приріст не переміщенню, а навантаженню, то робота виражатиметься інтегралом
Т аку
роботу
називають
додатковою.
На графіку (рис.3.1,б)
площа,
що відповідає додатковій роботі,
позначена горизонтальною штриховкою.
Сума дійсної і додаткової роботи
називається повною
роботою зовнішніх
сил:
аку
роботу
називають
додатковою.
На графіку (рис.3.1,б)
площа,
що відповідає додатковій роботі,
позначена горизонтальною штриховкою.
Сума дійсної і додаткової роботи
називається повною
роботою зовнішніх
сил:
О чевидно,
що повній роботі відповідає площа
прямокутника.
Для
лінійно деформованих систем між
навантаженням і переміщенням, що їм
зумовлене, існує лінійна залежність
(рис.3.1,в).
При
цьому
дійсна робота
зображується
площею заштрихованого трикутника.
Очевидно,
що
додаткова робота
в такому разі
дорівнює дійсній роботі:
чевидно,
що повній роботі відповідає площа
прямокутника.
Для
лінійно деформованих систем між
навантаженням і переміщенням, що їм
зумовлене, існує лінійна залежність
(рис.3.1,в).
При
цьому
дійсна робота
зображується
площею заштрихованого трикутника.
Очевидно,
що
додаткова робота
в такому разі
дорівнює дійсній роботі:
і може бути обчислена як площа трикутника
може бути обчислена як площа трикутника
О значена
рівність називається теоремою
Клапейрона: в лінійно-деформованих
системах дійсна робота статично
прикладеної сили дорівнює половині
добутку кінцевої
величини сили на відповідне кінцеве
переміщення, зумовлене цією силою.
Отже,
робота
сили
на
зумовлених
цією силою
переміщеннях
називається дійсною.
Якщо ж
сила P,
залишаючись
незмінною, здійснює роботу
на переміщеннях
значена
рівність називається теоремою
Клапейрона: в лінійно-деформованих
системах дійсна робота статично
прикладеної сили дорівнює половині
добутку кінцевої
величини сили на відповідне кінцеве
переміщення, зумовлене цією силою.
Отже,
робота
сили
на
зумовлених
цією силою
переміщеннях
називається дійсною.
Якщо ж
сила P,
залишаючись
незмінною, здійснює роботу
на переміщеннях![]() зумовлених
іншими діями, то
таку
роботу
називають
можливою.
Можлива
робота
дорівнює
добутку величини сили на
відповідне
переміщення, яке
зумовлене
іншими силами:
зумовлених
іншими діями, то
таку
роботу
називають
можливою.
Можлива
робота
дорівнює
добутку величини сили на
відповідне
переміщення, яке
зумовлене
іншими силами: