

21. Переход к новому опорному решению тз.
Итерации: После нахождения опорного плана перевозок, нужно применить
один из алгоритмов его улучшения, приближения к оптимальному.
2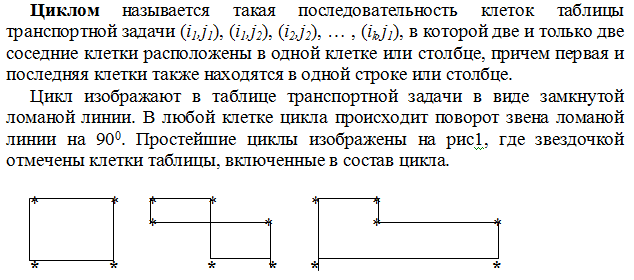 2..
Циклы строятся только по заполненным
клеткам. Точки самопересечения не явл-ся
вершинами цикла.
2..
Циклы строятся только по заполненным
клеткам. Точки самопересечения не явл-ся
вершинами цикла.
Допустимое решение транспортной задачи
Х=(![]() ),
i=1,2,,…,m,
j=1,2,…,n является
опорным тогда и только тогда, когда из
занятых им клеток таблицы нельзя
образовать ни одного цикла.
),
i=1,2,,…,m,
j=1,2,…,n является
опорным тогда и только тогда, когда из
занятых им клеток таблицы нельзя
образовать ни одного цикла.
23. Метод потенциалов. Теорема. Если план х* явл-ся опт-м, то ему соответствует система (m+n) чисел, Ui* и Vj*,которые удовлетворяют условиям:
Ui*+Vj*=Сij (xij>0), Ui* + Vj*>Cij (xij=0). Док-во: числа Ui* и Vj* - потенцилы поставщиков и потребителей, соответственно. По условиям (1,2,3) ИЗ к ней можно поставить двойную задачу:
У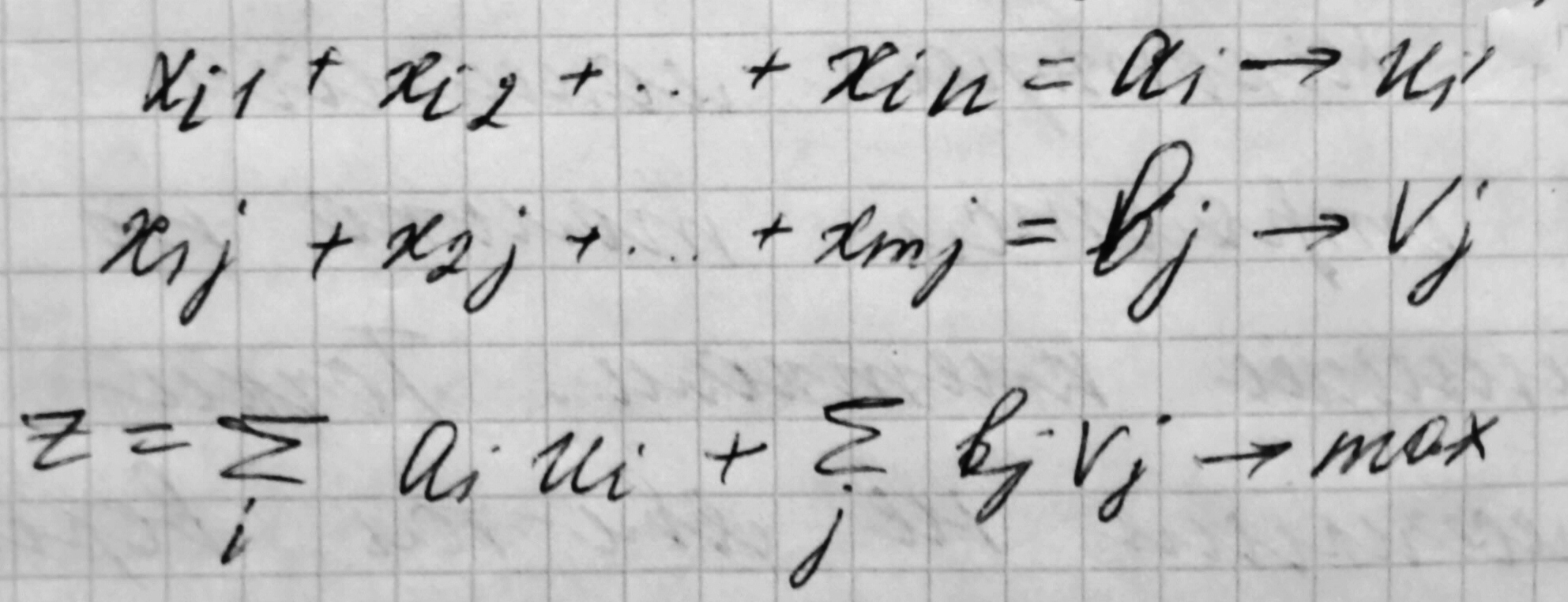 словия
новой задачи дают систему ограничений.
Получим двойственную задачу, имеющую
решение, если решается исходная задача.
Ограничений неотриц-ти
словия
новой задачи дают систему ограничений.
Получим двойственную задачу, имеющую
решение, если решается исходная задача.
Ограничений неотриц-ти
на переменные Ui b Vj нет, и в силу 1й теоремы двойств-ти, пара ДЗ одновременно разрешима или нет.
Сумма потенциалов равна тарифу клетки Cij.
Для каждой заполненной клетки находим потенциалы из условия ui*+vj*=Cij (xij>0). Для незаполненных клеток находим оценки:
Sij=(ui+vj) – Cij. Sij<=0. Если сущ-т хотя бы одна оценка Sij>0, то полученное решение не является оптимальным. Среди полученных положительных оценок Sij выбираем наибольшую,для указанной клетки строится цикл. Затем строится новый цикл, в котором
в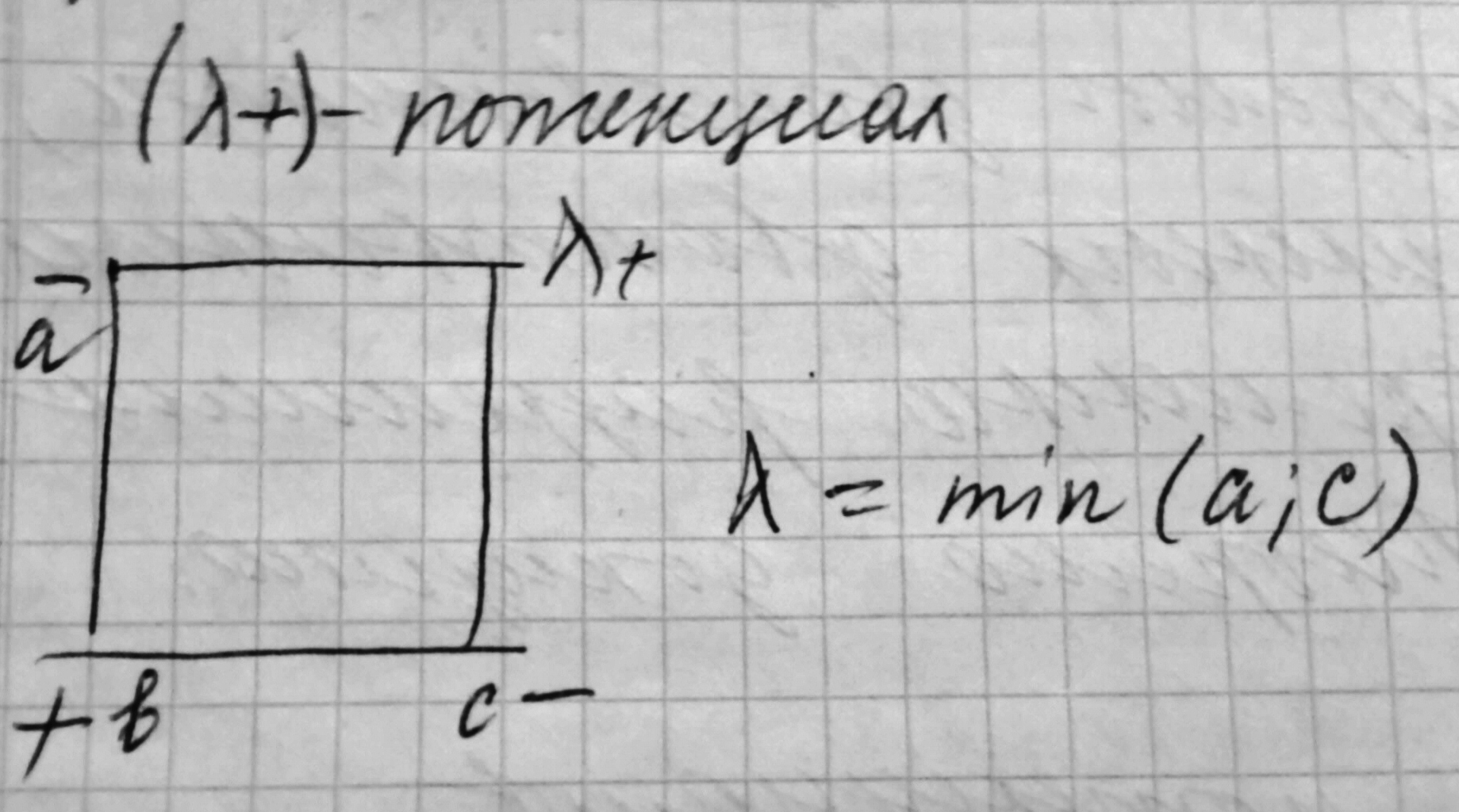 клетки с + и – добавляется λ, потенциал
перемещается по циклу.
клетки с + и – добавляется λ, потенциал
перемещается по циклу.
Вновь полученный план проверяем на оптимальность
24. Оценка свободной клетки. Для незаполненных клеток находим оценки:
S ij=(ui+vj)
– Cij. Sij<=0
ij=(ui+vj)
– Cij. Sij<=0
25. Критерий оптимальности. Переход к оценочной матрице. Sij=(ui+vj) – Cij. Sij<=0. Если сущ-т хотя бы одна оценка Sij>0, то полученное решение не является оптимальным. Составляется оценочная матрица С размерностью mxn, которая заполняется соответственно клеткам ТЗ полученными оценками (на месте заполненных клеток ставится 0). Если найдется хотя бы одна оценка Sij>0, план не является оптимальным. Среди полученных положительных оценок Sij выбираем наибольшую, для указанной клетки строится цикл. Опорное решение является оптимальным, если для всех векторов-условий (клеток таблицы) оценки неположительные.
26. Открытая модель тз. Сведение ее к закрытой модели.
Модель ТЗ называется моделью закрытого типа, если выполняется рав-во условие 1.
Модель ТЗ – закрытого типа, если выполняется одно из условий 2 или 3.
В
 о
втором случае:
о
втором случае:
Bn+1=Σai – Σbj – эффект. Потребителя;
В третьем случае:
Am+1= Σbj – Σai – эф. Поставщика
При введении фиктивного поставщика/потребителя, соответствующие тарифы полагаем равными 0.
27. Постановка задачи целочисленного программирования.
Существует ряд задач оптимального планирования, в которых переменные могут принимать лишь целочисленные значения. Такие задачи связаны с определением количества единиц неделимой продукции, числа станков при загрузке оборудования, численности работников в структурных подразделениях предприятия и т.д. Если функция и ограничения в таких задачах линейны, то мы говорим о задаче линейного целочисленного программирования.
Задача линейного целочисленного программирования формулируется следующим образом: Найти такой план
X = (X1, X2, ..., Xn),
при котором линейная функция
принимает максимальное или минимальное значение при ограничениях
 , i
= 1, 2, ..., m
, i
= 1, 2, ..., m
![]() , j
= 1, 2, ... n
, j
= 1, 2, ... n
![]() - целые
числа .
- целые
числа .
AX≤B
X≥0
Z=CX
X – целое
28. Метод Гомори. 1. Решаем поставленную задачу одним из методов. Находим опт-решение. Если координаты полученного решения целочисленны – задача решена.
Если координаты нецелочисленны, строят правильное отсечение: a=[a]+{a};
0≤{a}≤1, # [-1,3]=2 {-1,3} = 0,7.
2. Пусть после некот-й итерации получено след-ее ограничение:
д

 ля
того, чтобы xi принимало
целочисленные значения, необходимо,
чтобы выпол-сь усл-е 2.
ля
того, чтобы xi принимало
целочисленные значения, необходимо,
чтобы выпол-сь усл-е 2.
Если на некотором шаге имеем несколько нецелых значений bi, то целесообразно выбирать строку с наиб. дробной частью.