18. Боковая видимость
Боковая видимость-это расстояние на котором водитель имеет возможность заблаговременно увидеть на улице ребёнка, выбежавшего со двора или тротуара, а на пересечениях в одном уровне – приближающийся автомобиль или поезд.
Боковую видимость вычисляют :
Sбок = 2S1 Vn / Vp,
где Vn - скорость бегущего пешехода, пересекающего дорогу (Vn = 10км/ч);
Vp – расчетная скорость движения автомобиля для дороги принятой технической
категории;
 S-
расчетное
расстояние
видимости по первой схеме.
S-
расчетное
расстояние
видимости по первой схеме.
Нормы требуют обеспечивать боковую видимость от кромки проезжей части 25 м на дорогах 1-3 категорий и 15м на дорогах 4 и 5 категорий.
19. Обоснование параметров вертикальных кривых трассы а.Д.
Кривые в продольном профиле-это кривые, сопрягающие перелом продольного профиля при изм-ии уклона.
Различают: вогнутые и выпуклые. Вогнутые кривые применяют при переходе от спускак подъёму, а также при уменьшении уклона на спуске или повышении на подъёме. Выпуклые кривые применяют при переходе от подъёма к спуску,а также при уменьшении уклона на подъёме или повышении на спуске.
Минимальный
радиус вертикальной выпуклой кривой
определяют из условия обеспечения
видимости поверхности дороги
 ,
,
где S1 – расчетное расстояние видимости поверхности дороги;
h1 - высота глаза водителя легкового автомобиля над поверхностью дороги (h1 = 1,0м);
h2 – высота неподвижного препятствия (h2 = 0,15м);
Рекомендуемый радиус вертикальной выпуклой кривой вычисляют по условию обеспечения безопасного обгона
 ,
,
где S3 –расчетное расстояние видимости по условию обгона встречного автомобиля, принятое для проектирования;
Н - высота встречного легкового автомобиля (в курсовом проекте можно принять Н = 1,45м).
Минимальный радиус вертикальной вогнутой кривой определяем из условия недопущения перегрузки рессор
 ,
,
где
 - расчетная скорость для принятой
категории дороги,
- расчетная скорость для принятой
категории дороги,
ао – допускаемое центробежное ускорение, ао = 0,5-0,7м/с.
Рекомендуемый радиус вертикальной вогнутой кривой определяют из условия обеспечения видимости дороги ночью
 г
г
где S1– принятое расчетное расстояние видимости поверхности дороги;
hф - возвышение центра фары над поверхностью дороги, принимают по приложению 1; а - угол рассеивания пучка света фар, а = 2°.
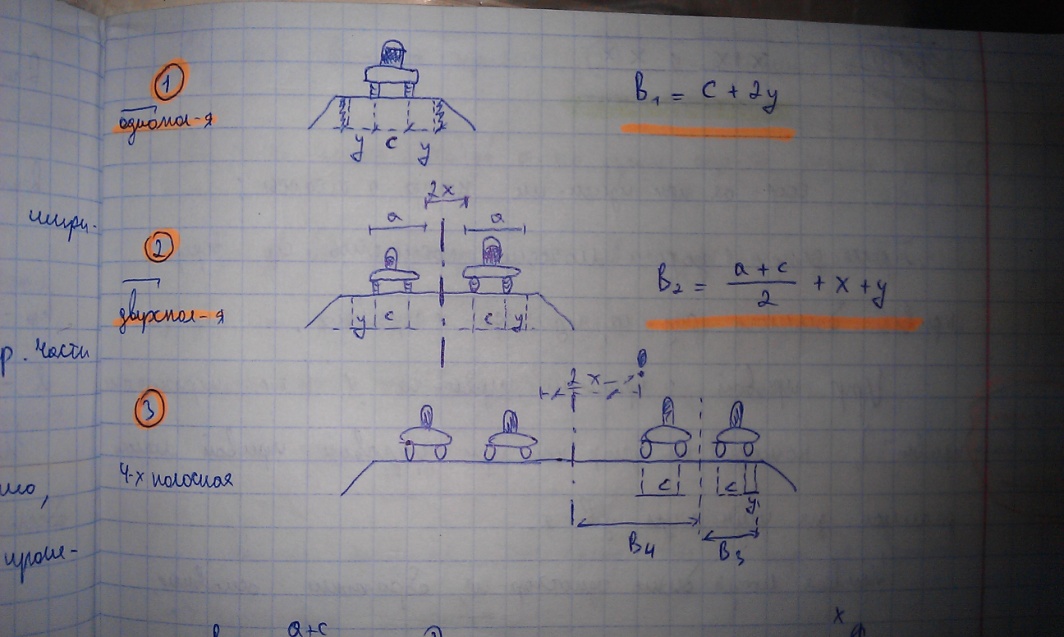
20. Обоснование ширины проезжей части.
Обоснование ширины проезжей части-это сложная техническо-экономическая задача. Полоса движения- это продольная полоса проезжей части, по которой проезжает тр-ое ср-во в один ряд. Ширина полосы движения зависит от ширины кузова авто, зазора безопасности движения и места расположения движения на проезжей части. Ширина полосы: