

2.1.13 Расчет регулировочных резисторов в цепи якоря дпт нв
Если известны естественная характеристика двигателя и его паспортные данные, и требуется рассчитать сопротивление резистора, при включении которого в цепь якоря требуемая искусственная характеристика пройдет через точку с заданными координатами А(ωИ, МИ), то поставленная задача легче всего может быть решена методом пропорций или методом отрезков.
Мотод пропорций. Основан на формуле для статического перепада скорости электропривода:
![]() (1)
(1)
Запишем отношение перепадов скоростей электропривода при токе IИ или моменте МИ на естественной и требуемой искусственной характеристиках:
 (2)
(2)
Из этой формулы выразим искомое RД:
![]() (3)
(3)
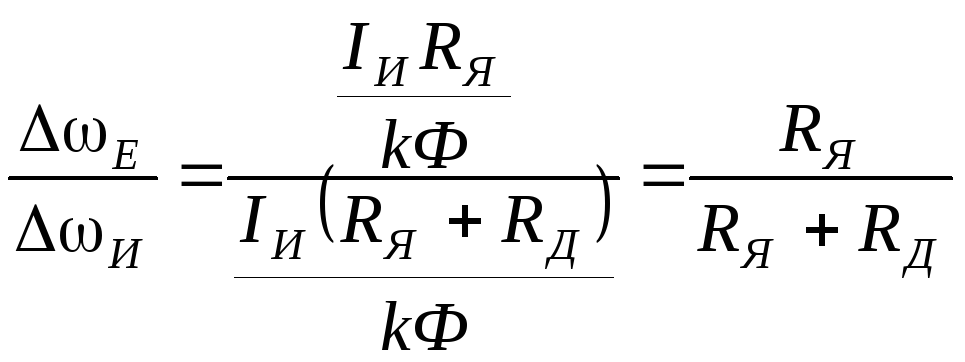
Перепады скорости на естественной и требуемой искусственной характеристиках показаны на рисунке 2.21,а.
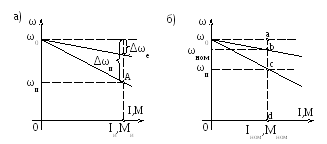
Рисунок 2.21 – Расчёт регулировочных резисторов в цепи якоря ДПТ НВ
Метод отрезков. Этот метод в отличие от метода пропорций нетребует данных о сопротивлении якоря двигателя, а позволяет при необходимости рассчитать его по известной естественной характеристике. Скорость на требуемой искусственной характеристике при номинальных значениях тока, момента, напряжения на якоре и магнитного потока определяется по формуле:
![]() (4)
где
(4)
где
![]() - общее сопротивления якорной цепи.
- общее сопротивления якорной цепи.
![]()
![]() (5)
(5)
Учитывая, что
![]() и обозначив
и обозначив
![]() ,
получим
,
получим
![]()
![]() (6)
(6)
Откуда
![]() (7)
(7)
![]() (8)
(8)
Формула (8) отражает важное свойство ДПТ НВ: относительный перерпад скорости равен относительному активному сопротивлению цепи якоря.
Пропорцию (8) удобно
решать с помощью характеристик, для
чего обратимся к рисунку 2.21,б. Обозначим
на характеристике точки a,b,c,d
и отметим, что
![]() ,
,
![]() .
Тогда
.
Тогда
![]() (9)
(9)
![]() (10)
(10)
![]() (11)
(11)
Таким образом, для определения RД необходимо по характеристикам определить длины отрезков bc и ad при номинальном токе или моменте, рассчитать номинальное сопротивление и по формуле (10) найти RД.
2.2 Электроприводы с двигателями постоянного тока последовательного и смешанного возбуждения
2.2.1 Схема включения, статические характеристики и режимы работы дпт последовательного возбуждения
В электроприводах электрического транспорта и ряда подъемных механизмов нашли широкое применение двигатели постоянного тока последовательного возбуждения. Основной особенностью данного двигателя является включение обмотки якоря последовательно с обмоткой возбуждения (рисунок 2.22,а), вследствие чего ток якоря является одновременно и током возбуждения, что существенно сказывается на свойствах и характеристиках двигателя.
Формулы электромеханической и механической характеристик двигателя имеют следующий вид:
![]() (1)
(1)
![]() (2)
(2)
где R – общее сопротивление якорной цепи, Ом.
![]() .
.
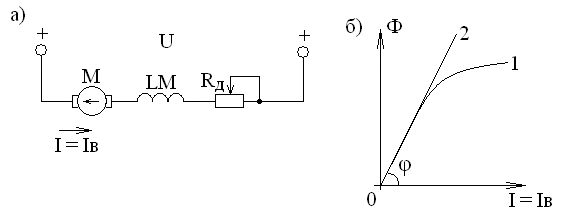
Рисунок 2.22 – Схема включения (а) и характеристики намагничивания (б) ДПТ последовательного возбуждения
Магнитный поток и ток связаны между собой кривой намагничивания 1 (рисунок 2.22,б), которую в простейшем случае можно аппроксимировать (приближенно заменить) прямой линией 2, что позволит описать ее следующим выражением:
![]() (3)
где
(3)
где
![]() .
.
Подставив (3) в (1), получим формулу, описывающую электромеханическую характеристику ДПТ последовательного возбуждения:
![]() (4)
(4)
Момент и ток в ДПТ связаны следующей зависимостью:
![]() (5)
(5)
Подставив (3) в (5) и выразив ток, получаем:
![]() (6)
(6)
Подставляем это выражение в (4) и получаем формулу механической характеристики ДПТ последовательного возбуждения:
![]() (7)
(7)
Для изображения
статических характеристик проведем
краткий анализ формул (4) и (7). При
![]() и
и
![]() как видно из этих формул, скорость будет
стремиться к бесконечности. А при
как видно из этих формул, скорость будет
стремиться к бесконечности. А при
![]() и
и
![]() значение скорости будет стремиться к
некоторому значению
значение скорости будет стремиться к
некоторому значению
![]() .
.
Общий вид статических характеристик ДПТ последовательного возбуждения показан на рисунке 2.23.
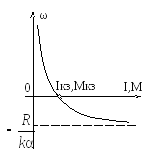
Рисунок 2.23 – Статические характеристики ДПТ последовательного возбуждения
Из характеристик видно, что в основной схеме включения у ДПТ последовательного возбуждения не существует режимов идеального холостого хода и рекуперативного торможения, так как отсутствуют участки характеристик во втором квадранте. Остальные режимы работы аналогичны режимам работы ДПТ НВ.
Регулирование скорости ДПТ последовательного возбуждения может осуществляться с помощью добавочных резисторов в цепи якоря, изменением магнитного потока двигателя и подводимого к нему напряжения.