

ОСНОВЫ ЭЛЕКТРОПРИВОДА
Введение
Электроприводом (ЭП) называется электромеханическая система, состоящая из электродвигательного, передаточного, преобразовательного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочих машин и управления этим движением.
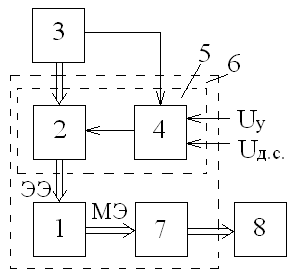
ЭЭ — электрическая энергия
МЭ — механическая энергия
Uд.с. — дополнительные сигналы
Uy — сигнал управления
Рисунок 1 – Общая структурная схема электропривода
Основным элементом любого электропривода (6) является электродвигатель (1). От электродвигателя механическая энергия (МЭ) через передаточное устройство (7) (механическое, гидравлическое, электромагнитное) подается на исполнительный орган рабочей машины (8), за счет чего он совершает механические движения. Функция передаточного устройства заключается в согласовании движений электродвигателя и исполнительного органа. Электроэнергия (ЭЭ) потребляется двигателем от источника электрической энергии (3). Для получения электрической энергии необходимых для двигателя параметров между двигателем и источником включается силовой преобразователь (2), который вместе с маломощным блоком управления (4) образует систему управления (5).
Классификация электроприводов
1) По назначению различают ЭП главного и вспомогательного движения.
2) По роду тока различают ЭП постоянного и переменного тока.
3) По характеристике движения различают ЭП вращательного и поступательного движения. При этом скорость ЭП может быть регулируемой или нерегулируемой, а само движение непрерывным или дискретным, однонаправленным, двунаправленным (реверсивным) или вибрационным
(возвратно-поступательным).
4) По количеству используемых электродвигателей ЭП бывают индивидуальные, групповые и взаимосвязанные.
5) По виду силового преобразователя. В качестве силового преобразователя могут использоваться управляемые и неуправляемые выпрямители, управляемые и неуправляемые инверторы, преобразователи частоты и напряжения переменного тока, импульсные преобразователи напряжения постоянного тока.
Основные направления развития современного эп
К основным направлениям развития современного ЭП относятся:
- разработка и выпуск комплектных регулируемых ЭП с использованием современных преобразователей и микропроцессорного управления;
- повышение эксплуатационной надежности, унификации и улучшение энергетических показателей ЭП;
- расширение области применения регулируемого асинхронного ЭП и использование ЭП с новыми типами двигателей, а именно линейными, шаговыми, вентильными, вибрационными, повышенного быстродействия, магнитогидродинамическими и др.;
- развитие научно-исследовательских работ по созданию математических моделей и алгоритмов технологических процессов, а также машинных средств проектирования ЭП;
- подготовка инженерно-технических и научных кадров, способных проектировать, создавать и эксплуатировать современный автоматизированный электропривод.
Решение этих и ряда других проблем позволит существенно улучшить технико-экономические характеристики ЭП и создать тем самым базу для дальнейшего технического прогресса во всех отраслях промышленного производства, транспорта, сельского хозяйства и в быту.
Раздел 1 Механика электропривода
Тема 1.1 Структура механической части электропривода
1.1.1 Уравнения, описывающие движение в механической части электропривода
В общем случае механическая часть электропривода состоит из вращающегося ротора электродвигателя (М), передаточного устройства (ПУ) и исполнительного органа рабочей машины (ИО) (рисунок 1.1).
Ротор является источником или потребителем механической энергии. Он обладает определенным моментом инерции, может вращаться в требуемом направлении с нужной скоростью и развивать движущий или тормозящий момент.
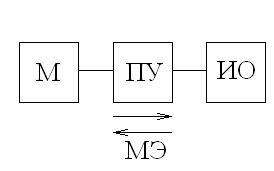
Рисунок 1.1 – Структура механической части электропривода
Передаточное устройство передает и преобразовывает движение в механической части электропривода. В качестве передаточного устройства могут использоваться редукторы, различные виды передач, барабан с тросом, кривошипно-шатунный механизм и т. д. Иногда передаточное устройство может отсутствовать.
Поступательное и вращательное движение любого элемента механической части электропривода может быть описано следующими уравнениями:
![]() –
поступательное
движение;
–
поступательное
движение;
![]() –
вращательное
движение,
–
вращательное
движение,
где ∑F– совокупность сил, действующих на элемент, Н;
∑M – совокупность моментов, действующих на элемент, Н∙м2.
m – масса элемента, кг;
J – момент инерции элемента, кг∙м2;
V – линейная скорость, м/с2;
ω – угловая скорость, рад/с;
t – время, с.
Чаще всего в процессе движения m и J остаются постоянными. Их производные при этом равны нулю и уравнения упрощаются:
![]()
![]() ,
,
где
![]() - линейное ускорение;
- линейное ускорение;
![]() -
угловое ускорение.
-
угловое ускорение.
Если
![]() и
и
![]() ,
то элемент будет двигаться с ускорением,
а если
,
то элемент будет двигаться с ускорением,
а если
![]() и
и
![]() ,
то с замедлением. Если
,
то с замедлением. Если
![]() и
и
![]() ,
то и совокупность сил и моментов,
действующих на элемент, также будут
равны нулю. В этом случае элемент будет
двигаться с постоянной скоростью или
находиться в состоянии покоя. Такое
движение элемента называется
установившимся.
,
то и совокупность сил и моментов,
действующих на элемент, также будут
равны нулю. В этом случае элемент будет
двигаться с постоянной скоростью или
находиться в состоянии покоя. Такое
движение элемента называется
установившимся.