

1.1.5 Устойчивость установившегося движения в эп
Установившимся называется такое движение в электроприводе, которое соответствует равенству моментов двигателя и нагрузки: М = МС.
Понятие механических характеристик позволяет просто и удобно выполнить проверку условия установившегося движения. Для этого механические характеристики двигателя и исполнительного органа совмещаются в одном квадранте. Точка их пересечения соответствует установившемуся движению (рисунок 1.4). В зависимости от вида механических характеристик двигателя и исполнительного органа движение в электроприводе может быть устойчивым и неустойчивым. Под устойчивостью понимается свойство системы «двигатель – исполнительный орган» поддерживать движение с установившейся скоростью при возможных небольших отклонениях от нее.
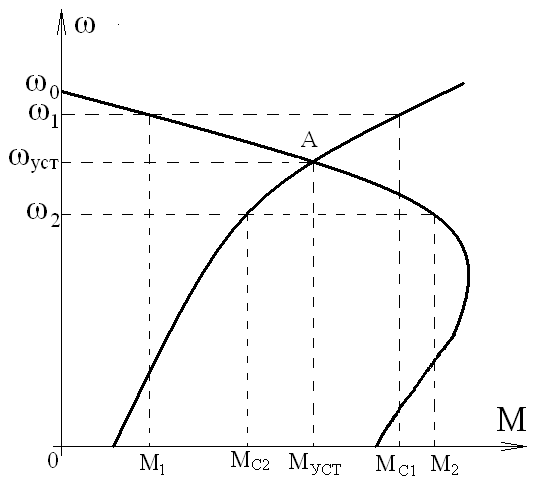
Рисунок 1.4 – Определение устойчивости установившегося движения
Для определения устойчивости установившегося движения предположим, что по какой-либо причине скорость электропривода повысилась до ω1. Из характеристик видно, что момент двигателя при этом стал меньше момента нагрузки ( М1 < МС1). При этом в системе начинает действовать отрицательный динамический момент МДИН1, под действием которого скорость электропривода начнет уменьшаться. Этот процесс уменьшения скорости закончится в точке А, когда момент двигателя сравняется с моментом нагрузки. При скорости ω2<ωуст. все произойдет наоборот. Таким образом, система с такими характеристиками обладает свойством устойчивости.
Тема 1.2 Неустановившееся механическое движение эп
1.2.1 Неустановившееся движение эп при постоянном динамическом моменте
Неустановившееся движение возникает в электроприводе, когда момент двигателя не равен моменту нагрузки, т.е. М ≠ МС. В этом случае динамический момент не равен нулю, и происходит увеличение или снижение скорости движения. Примерами неустановившегося движения в ЭП являются пуск, торможение и реверс двигателя, его переходы с одной скорости на другую в процессе её регулирования или изменения нагрузки на валу.
Целью рассмотрения неустановившегося движения является получение зависимостей координат электропривода (момента, угловой скорости, тока) от времени (М(t), ω(t), I(t)). Эти зависимости получаются решением основного уравнения движения электропривода
![]() (1)
(1)
и уравнения
![]() .
(2)
.
(2)
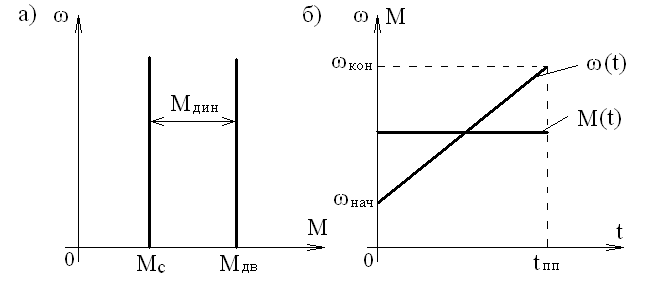
Рисунок 1.5 – а) Механические характеристики двигателя и нагрузки
б) Графики переходных процессов ЭП при линейных механических характеристиках двигателя и нагрузки
Если динамический момент является постоянным и положительным (рисунок 1.5,а), то решение уравнения (1) будет выглядеть следующим образом:
![]() (3)
(3)
Из формулы (3) видно, что в данном случае скорость будет линейно зависеть от времени и при М - МС >0, ω возрастает, а при М – МС <0, ω уменьшается.
На рисунке 1.5,б показаны зависимости скорости и момента двигателя от времени при постоянном и положительном динамическом моменте.
Время переходного процесса tПП определим из формулы (3) при
подстановке: t = tПП, ω = ωКОН.
![]()