

Раздел 2 Электроприводы с двигателями постоянного тока
Тема 2.1 Электропривод с двигателями постоянного тока независимого возбуждения (дпт нв)
2.1.1 Схема включения и статические характеристики дпт нв
На рисунке 2.1.а приведена схема включения ДПТ независимого возбуждения.

Рисунок 2.1 – Схема включения(а) и статические характеристики(б) ДПТ НВ
На схеме приняты следующие обозначения: U – напряжение на якоре, В; UВ – напряжение на обмотке возбуждения, В; I – ток якоря, А; IВ– ток возбуждения, А; RД – добавочное сопротивление в цепи якоря, Ом; RВ – добавочное сопротивление в цепи обмотки возбуждения, Ом; Rя – сопротивление якоря, Ом.
Rя = 1,25(rоя + rдп) + rко + rщ.
rоя – сопротивление обмотки якоря.
rдп – сопротивление добавочных полюсов.
rко – сопротивление компенсационной обмотки.
rщ – сопротивление щёточного контакта.
Коэффициент 1,25 перед скобкой в данной формуле учитывает увеличение сопротивления обмоток ДПТ при нагревании.
В установившемся режиме работы по второму закону Кирхгофа для якорной цепи двигателя можно записать следующее выражение:
U=IR + E, (1)
где E=kФω — ЭДС вращения (противоЭДС), (2)
k – конструктивный коэффициент двигателя,
Ф – основной магнитный поток,
ω – угловая скорость вращения якоря.
Направление токов и ЭДС, указанное на схеме, соответствует двигательному режиму работы.
R=![]() —
общее сопротивление якорной цепи.
—
общее сопротивление якорной цепи.
Подставляя (2) в (1), получаем: U=IR + kФω, откуда
![]() (3)
(3)
Такая зависимость ω = f(I) называется электромеханической или скоростной характеристикой ДПТ НВ.
Ток и момент двигателя связаны следующей зависимостью
M = kФI , откуда получаем
![]() (4)
(4)
Для получения выражения механической характеристики ДПТ НВ подставим (4) в (3):
![]() (5)
(5)
Электромеханические и механические характеристики ДПТ НВ представляют собой линейные зависимости угловой скорости от тока и момента, вид которых для разных полярностей питающего напряжения якоря приведён на рисунке 2.1.б. Эти характеристики совмещены, что справедливо в случае kФ = const.
Из формул (3) и (5) видно, что при I = 0 и М = 0 характеристика проходит через точку ω0. Скорость ω0 называется скоростью идеального холостого хода и определяется по формуле
![]() (6)
(6)
При скорости идеального холостого хода, когда момент на валу двигателя равен нулю, ток в цепи якоря не протекает, т.к. ЭДС якоря становится равной по величине приложенному напряжению, но действует навстречу ему.
Если двигатель до
приложения нагрузки работал со скоростью
ω0,
то после приложения нагрузки МС
его скорость уменьшится до некоторого
значения ω. Разность значений установившихся
скоростей электропривода до и после
приложения нагрузки называется
статическим перепадом скорости ЭП и
обозначается
![]() (рисунок 2.2).
(рисунок 2.2).
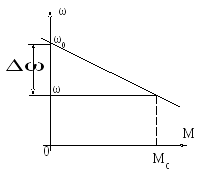
Рисунок 2.2 –
Статический перепад скорости ЭП
![]()
![]() (7)
(7)
Таким образом, формулы (3) и (5) можно записать в обобщенном виде:
![]() (8)
(8)
Формулы (3) и (5) позволяют назвать основные способы получения искусственных (регулировочных) характеристик ДПТ НВ, используемых для регулирования его координат (I,М, ω):
1 введение в цепь якоря добавочного сопротивления;
2 изменение магнитного потока;
3 изменение подводимого к якорю напряжения.
Входящие также в эти выражения I и M определяются только механической нагрузкой ЭП и их значения не могут быть установлены произвольно.