

3.1.9 Регулирование координат ад изменением частоты подводимого напряжения
Принцип частотного
метода основан на том, что изменяя
частоту
![]() питающего двигатель напряжения, можно
соответственно с формулой
питающего двигатель напряжения, можно
соответственно с формулой
![]() изменять скорость вращения магнитного
поля статора, получая при этом различные
искусственные характеристики.
изменять скорость вращения магнитного
поля статора, получая при этом различные
искусственные характеристики.
Достоинства способа:
1 Широкий диапазон регулирования скорости;
2 Плавность регулирования
3 Высокая жесткость получаемых характеристик
4 Невысокие потери
скольжения
![]()
Для лучшего использования АД и получения высоких энергетических показателей его работы одновременно с частотой необходимо изменять и подводимое напряжение, закон изменения которого зависит от характера изменения нагрузки.
Преобразователь частоты и напряжения 1 по сигналу управления преобразует входное напряжение стандартных параметров в напряжение с регулируемыми частотой и амплитудой (рисунок 3.10,а).
Характеристика 1 (рисунок 3.10,б) является естественной. Она соответствует номинальной частоте питающего напряжения.
Искусственные механические характеристики по своим особенностям делятся на два семейства. Первое – характеристики соответствующие частотам ниже номинальной, для которых критический момент остается постоянным (характеристики 2 и 3). Второе семейство – это характеристики, соответствующие частотам выше номинальной, где критический момент уменьшается с увеличением частоты (характеристики 4 и 5).
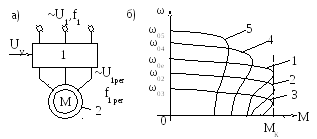
Рисунок 3.10 – Схема и механические характеристики АД при частотном способе регулирования координат
3.1.10 Принцип действия преобразователей частоты
Преобразователи частоты (ПЧ) по используемой для их построения элементной базе делятся на электромашинные вращающиеся и статические.
Электромашинные вращающиеся ПЧ строятся на базе электрических машин. Рассмотрим схему ПЧ с синхронным генератором (рисунок 3.11).
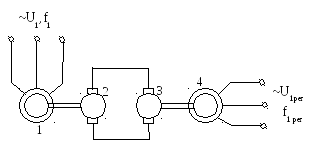
Рисунок 3.11 – Схема ПЧ с синхронным генератором
Преобразователь состоит из двух частей: агрегата постоянной скорости, состоящего из АД 1 и приводимого им генератора постоянного тока 2 и агрегата переменной скорости, состоящего из регулируемого ДПТ 3, приводящего во вращение синхронный генератор переменной частоты 4. Изменением магнитного потока генератора 2 изменяется напряжение на якоре ДПТ 3, а следовательно, и скорость вращения ДПТ и синхронного генератора 4. При этом меняется и частота напряжения на выводах генератора.
Достоинства системы:
1 Плавность регулирования скорости;
2 Широкий диапазон регулирования скорости.
Недостатки:
1 Высокие потери и низкий КПД
2 Высокая стоимость;
3 Громоздкость;
4 Необходимость в обслуживании;
5 Повышенный шум.
Статические ПЧ строятся на базе элементов и устройств, не имеющих движущихся частей (полупроводниковых приборов, конденсаторов и т.д.) Статические ПЧ делятся на преобразователи без звена постоянного тока и преобразователи с промежуточным звеном постоянного тока.
Рассмотрим упрощенную функциональную схему преобразователя без звена постоянного тока (рисунок 3.12,а).
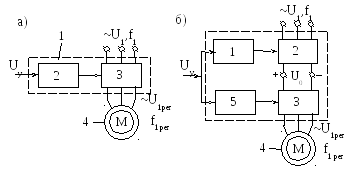
Рисунок 3.12 – Статические преобразователи частоты
Преобразователь состоит из двух частей: силовой части 3, с которой связан АД 4, и блока управления 2. Сих помощью осуществляется преобразование электроэнергии переменного тока стандартных параметров в электроэнергию переменного тока с регулируемыми частотой и величиной.
Функциональная схема преобразователя с промежуточным звеном постоянного тока приведена на рисунке 3.12,б. Схема состоит из двух основных блоков: управляемого выпрямителя 2 и управляемого инвертора 3 с блоками управления 1 и 5. Напряжение сети с помощью управляемого выпрямителя 2 сначала преобразовывается в постоянное напряжение U0, которое может регулироваться по величине в зависимости от сигнала управления. Далее это регулируемое напряжения поступает на вход управляемого инвертора 3, который преобразовывает его в трехфазное переменное напряжение с регулируемыми частотой и величиной. За счет двойного преобразования эта схема обеспечивает больший диапазон регулирования по сравнению с предыдущей схемой.