

2.1.5 Пуск дпт
В установившемся режиме работы ток якоря ДПТ НВ определяется по формуле:
![]()
При пуске, когда скорость вращения якоря ω равна нулю, ЭДС якоря также равна нулю, что вызывает увеличение тока якоря при пуске:
![]()
Пусковой ток при этом определяется выражением:
![]()
![]()
Так как сопротивление якоря ДПТ обычно имеет величину от долей Ома до нескольких Ом, то кратность пускового тока составляет IП = (3 – 20)IНОМ. Первая цифра в скобках соответствует двигателям малой мощности, вторая – двигателям большой мощности.
Увеличение пускового тока в двигателях малой мощности не вызывает опасных последствий, так как кратность тока невелика, а продолжительность процесса пуска небольшая. Поэтому двигатели малой мощности (до 1 кВт) пускают в ход непосредственным включением в сеть. У двигателей мощностью более 1 кВт кратность пускового тока гораздо выше, а время разгона якоря продолжительней. Большая кратность пускового тока вызывает сильное искрение на коллекторе, и может привести к резкому падению напряжения питающей сети, что может плохо отразиться на работе других потребителей энергии, включенных в ту же сеть. Поэтому для пуска двигателей мощностью более 1 кВт принимают специальные меры для ограничения пускового тока. Обычно это пусковые реостаты, включенные последовательно в цепь якоря.
Для пуска двигателя большой мощности использование пусковых реостатов нецелесообразно из-за больших размеров реостатов и больших потерь в них. Поэтому такие двигатели запускаются методом понижения напряжения.
2.1.6 Пусковая диаграмма дпт нв
Пусковой диаграммой называется совокупность двух и более искусственных характеристик, используемых при пуске двигателя (рисунок 2.8).
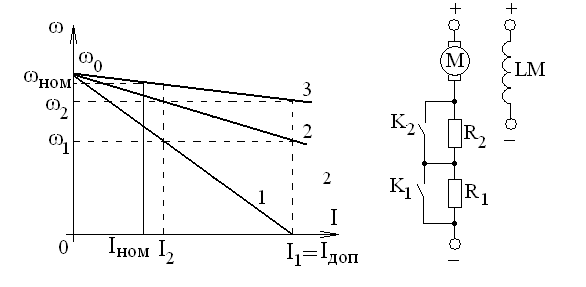
Рисунок 2.8 – Пусковая диаграмма и схема пуска ДПТ НВ
Двигатель запускается по искусственной характеристике 1. При включении ток и момент двигателя ограничиваются до допустимого уровня
суммарным
сопротивлением ступеней R1
и R2.
При скорости ω1,
когда ток в цепи якоря уменьшается до
значения
![]() ключом К1
закорачивается ступень R1,
и двигатель переходит на искусственную
характеристику 2, соответствующую
включению в цепь якоря ступени R2..
При скорости ω2
ключом К2
закорачивается ступень R2,
и двигатель
выходит на естественную характеристику
3, по которой продолжает разгон до
номинальной скорости.
ключом К1
закорачивается ступень R1,
и двигатель переходит на искусственную
характеристику 2, соответствующую
включению в цепь якоря ступени R2..
При скорости ω2
ключом К2
закорачивается ступень R2,
и двигатель
выходит на естественную характеристику
3, по которой продолжает разгон до
номинальной скорости.
2.1.7 Регулирование координат дпт нв изменением магнитного потока
При использовании этого способа магнитный поток обычно уменьшается по сравнению с номинальным, так как магнитная система ДПТ в номинальном режиме находится в насыщении, и увеличение тока возбуждения не приводит к заметному росту магнитного потока, а вызывает лишь дополнительный нагрев обмотки возбуждения, что видно из характеристики намагничивания ДПТ НВ (рисунок 2.9).
Для регулирования тока возбуждения обычно используется включение в цепь обмотки возбуждения добавочного резистора или питание обмотки возбуждения от управляемого выпрямителя (изменение напряжения на обмотке возбуждения). Схемы питания обмотки возбуждения в этих случаях показаны на рисунке 2.10.

Рисунок 2.9 – Кривая намагничивания ДПТ НВ
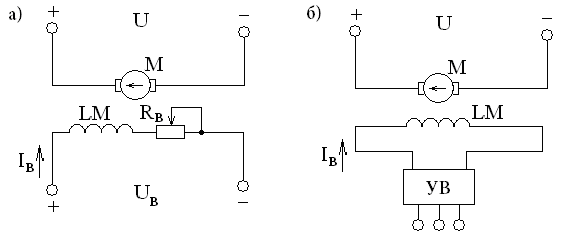
Рисунок 2.10 – Регулирование тока возбуждения ДПТ НВ
На рисунке 2.11 показаны статические характеристики ДПТ НВ при уменьшении магнитного потока. а приведенные ниже формулы поясняют положение искусственных характеристик 2 и 3 по отношению к естественной характеристике 1.
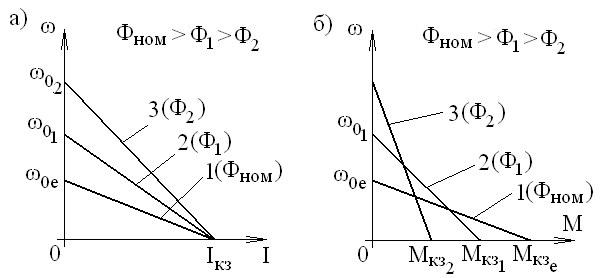
Рисунок 2.11 – Статические характеристики ДПТ НВ при уменьшении магнитного потока
![]() ,
,
![]() ,
,
![]()
1 Диапазон регулирования скорости при данном способе равен 3÷4.
2 Направление регулирования скорости – вверх от номинальной.
3 Плавность регулирования скорости определяется плавностью регулирования тока возбуждения.
4 Стабильность скорости достаточно высокая, хотя она и снижается при уменьшении магнитного потока.
5 Способ экономичен, т.к. не сопровождается значительными потерями мощности, а реализация его не требует больших капитальных затрат.