

3.1.2 Схема замещения ад
Для получения выражений электромеханической и механической характеристик АД используется его схема замещения, в которой ток, ЭДС и параметры цепи ротора приведены к цепи статора, что позволяет изобразить эти две цепи на схеме электрически связанными, хотя в действительности связь между ними осуществляется через электромагнитное поле. Приведение параметров производится с помощью коэффициента трансформации АД по ЭДС.
На рисунке 3.2 представлена П-образная схема замещения АД.
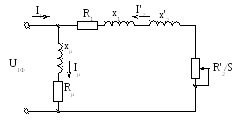
Рисунок 3.2 – П-образная схема замещения АД
В дальнейшем эта схема используется для вывода формул статических характеристик АД. На схеме приняты следующие обозначения: U1Ф - действующее значение фазного напряжения сети; I1, Iμ, I'2 – фазные токи статора, намагничивания и приведенный ток ротора; R1 – суммарное активное сопротивление фазы статора; R'2 – приведенное суммарное активное сопротивление фазы ротора; x1 и x'2 - индуктивные сопротивления фазы статора и приведенное фазы ротора; Rμ и xμ - параметры цепи намагничивания; S – скольжение АД.
Скольжение – это величина, характеризующая разность скоростей (частот) вращения магнитного поля статора АД и ротора.
![]()
![]() где
ω0
– скорость вращения магнитного поля
статора, рад/с;
где
ω0
– скорость вращения магнитного поля
статора, рад/с;
ω – скорость вращения ротора, рад/с;
n0 – частота вращения магнитного поля статора, об/мин;
n - частота вращения ротора, об/мин.
Скорость и частота вращения магнитного поля статора определяются по формулам
![]() ,
,
![]() ,
где
f1
– частота подводимого к статору
напряжения;
,
где
f1
– частота подводимого к статору
напряжения;
p – число пар полюсов АД.
3.1.3 Электромеханическая характеристика ад
Эта характеристика описывается выражением, полученным непосредственно из схемы замещения АД:
 где
где
![]() - индуктивное фазное сопротивление
короткого замыкания.
- индуктивное фазное сопротивление
короткого замыкания.
В отличие от ДПТ
электромеханическая характеристика
АД представляется в виде зависимости
приведенного тока ротора от скольжения,
![]() ,
а переход к виду
,
а переход к виду
![]() осуществляется с помощью формулы
осуществляется с помощью формулы
![]() .
На рисунке 3.3 представлен общий вид
электромеханической характеристики
АД.
.
На рисунке 3.3 представлен общий вид
электромеханической характеристики
АД.
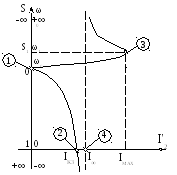
Рисунок 3.3 – Электромеханическая характеристика АД
Рассмотрим ее характерные точки:
1 S=
0, ω=
0,
![]() —
точка идеального холостого хода;
—
точка идеального холостого хода;
2 S=
1, ω=
0,
![]() —
точка короткого замыкания;
—
точка короткого замыкания;
3
![]() ,
,
![]() ,
,
![]() —
точка максимального значения тока
ротора, лежащая в области отрицательных
скольжений.
—
точка максимального значения тока
ротора, лежащая в области отрицательных
скольжений.
4
![]() ;
;
![]() ;
;
![]() - асимптотическое значение тока ротора
при бесконечно большом увеличении
скольжения и скорости.
- асимптотическое значение тока ротора
при бесконечно большом увеличении
скольжения и скорости.
3.1.4 Механическая характеристика ад
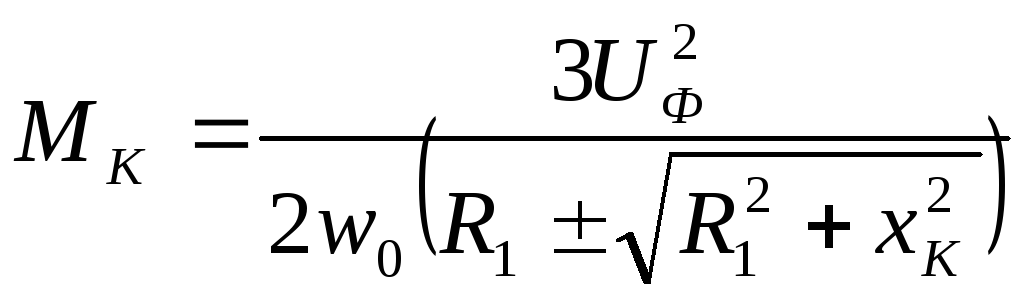
Механическая характеристика АД описывается следующим выражением:

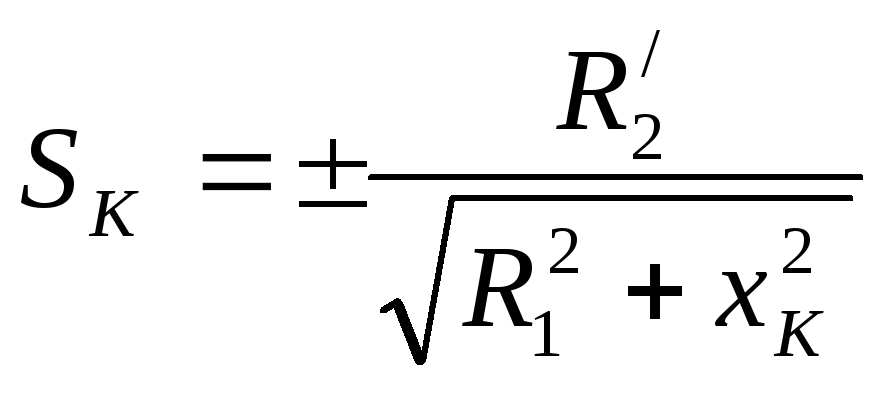
Исследование данного выражения на экстремум, которое осуществляется приравниванием производной dM/dS к нулю, дает наличие уэтой характеристики двух экстремальных значений момента и скольжения:
На рисунке 3.4 представлен общий вид механической характеристики АД.
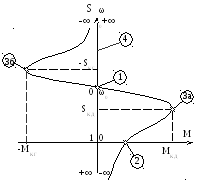
Рисунок 3.4 – Механическая характеристика АД
Рассмотрим ее характерные точки:
1 S= 0, ω= 0, М = 0 – точка идеального холостого хода;
2 S= 1, ω= 0, М = МКЗ – точка короткого замыкания;
3 а) S = SКД, М = МКД
б) S = – SКГ, М = – МКГ – точки экстремумов
4
![]() – асимптота механической характеристики.
– асимптота механической характеристики.
Часто для расчета рабочего участка механической характеристики используется упрощенная формула Клосса:
 ,
,
где
![]() -
критический момент АД,
-
критический момент АД,
![]() -
критическое скольжение.
-
критическое скольжение.
Критическое скольжение также можно рассчитать черезноминальное скольжение и перегрузочную способность АД:
![]() ,
где
,
где
![]() - коэффициент,
характеризующий перегрузочную способность
АД.
- коэффициент,
характеризующий перегрузочную способность
АД.
![]()